Products: ABAQUS/Standard ABAQUS/Explicit ABAQUS/CAE
Cohesive elements:
are used to model adhesives between two components, each of which may be deformable or rigid;
are used to model interfacial debonding using a cohesive zone framework;
are used to model gaskets and/or small adhesive patches;
can be connected to the adjacent components by sharing nodes, by using mesh tie constraints, or by using MPCs type TIE or PIN; and
may interact with other components via contact for gasket applications.
The cohesive zone must be discretized with a single layer of cohesive elements through the thickness. If the cohesive zone represents an adhesive material with a finite thickness, the continuum macroscopic properties of this material can be used directly for modeling the constitutive response of the cohesive zone. Alternatively, if the cohesive zone represents an infinitesimally thin layer of adhesive at a bonded interface, it may be more relevant to define the response of the interface directly in terms of the traction at the interface versus the relative motion across the interface. Finally, if the cohesive zone represents a small adhesive patch or a gasket with no lateral constraint, a uniaxial stress state provides a good approximation to the state of these elements. ABAQUS provides modeling capabilities for all the above cases. The details are discussed in later sections.
At least one of either the top or the bottom face of the cohesive element must be constrained to another component. In most applications it is appropriate to have both faces of the cohesive elements tied to neighboring components. If only one face of the cohesive element is constrained and the other face is free, the cohesive element exhibits one or (for three-dimensional elements) more singular modes of deformation due to the lack of membrane stiffness. The singular modes can propagate from one cohesive element to the adjacent one but can be suppressed by constraining the nodes on the side face at the end of a series of cohesive elements.
In some cases it may be convenient and appropriate to have cohesive elements share nodes with the elements on the surfaces of the adjacent components. More generally, when the mesh in the cohesive zone is not matched to the mesh of the adjacent components, cohesive elements can be tied to other components. When cohesive elements are used to model gaskets, it may be more appropriate to tie or share nodes on one side and define contact on the other side as discussed below. This will prevent the gaskets from being subjected to tensile stresses.
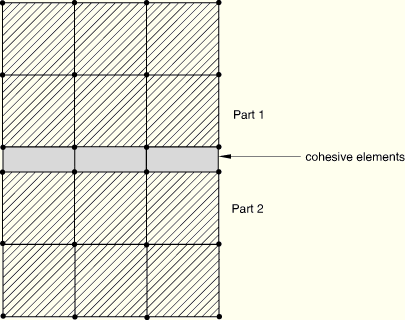
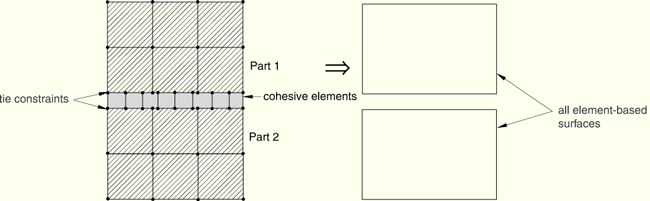
When the cohesive elements and their neighboring parts have matched meshes, it is straightforward to connect cohesive elements to other components in a model simply by sharing nodes (see Figure 18.5.3–1).
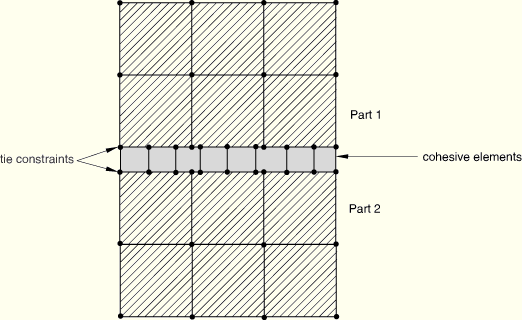
When these elements are used as adhesives or to model debonding, this method can be used to obtain initial results from a model—more accurate local results (in the decohesion zone) would typically be obtained with the cohesive zone more refined than the elements of the surrounding components. When these elements are used to model gaskets, this approach is suitable in situations when no frictional slip occurs between the gaskets and the surrounding components. The method of sharing nodes in gasket applications will lead to tensile stresses in the gasket should the parts connected to the gasket be pulled apart. Defining contact on one side of the cohesive elements will avoid such tensile stresses.If the two neighboring parts do not have matched meshes, such as when the discretization level in the cohesive layer is different (typically finer) from the discretization level in the surrounding structures, the top and/or bottom surfaces of the cohesive layer can be tied to the surrounding structures using a tie constraint (“Mesh tie constraints,” Section 20.3.1). Figure 18.5.3–2 shows an example in which a finer discretization is used for the cohesive layer than for the neighboring parts.
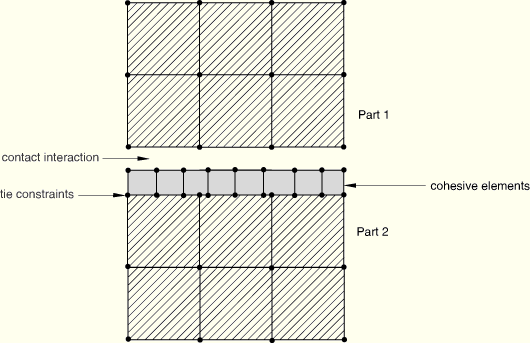
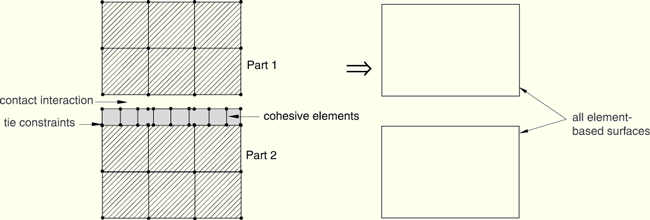
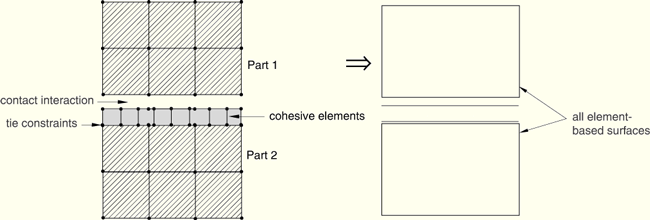
For some applications involving gaskets it is appropriate to define contact on one side of the cohesive element (see Figure 18.5.3–3). Contact can be defined with either the general contact algorithm in ABAQUS/Explicit (“Defining general contact interactions,” Section 21.3.1) or the contact pair algorithm in ABAQUS/Standard (“Defining contact pairs in ABAQUS/Standard,” Section 21.2.1) or ABAQUS/Explicit (“Defining contact pairs in ABAQUS/Explicit,” Section 21.4.1). If pure master-slave contact is used, typically the surface of the cohesive elements should be the slave surface and the surface of the neighboring part should be the master surface. This choice of master and slave is based on the cohesive zone typically being composed of softer materials and having a finer discretization. The second consideration also suggests that mismatched meshes will often be used in analyses involving cohesive elements. If mismatched meshes are used, the pressure distribution on the cohesive elements may not be predicted accurately; submodeling (“Submodeling,” Section 7.3.1) may be required to obtain accurate local results.
Cohesive elements can be used in large-displacement analyses. The assembly containing the cohesive elements can undergo finite displacement as well as finite rotation.
As discussed earlier, cohesive elements can be used to model finite-thickness adhesives, negligibly thin adhesive layers for debonding applications, as well as gaskets and/or small adhesive patches. You must choose one of these broad classes of applications when you define the section properties of cohesive elements. The detailed implications of each choice are discussed in “Defining the constitutive response of cohesive elements using a continuum approach,” Section 18.5.5, and “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6.
| Input File Usage: | Use the following option to model a finite-thickness adhesive layer using a continuum-based constitutive response: |
*COHESIVE SECTION, RESPONSE=CONTINUUM Use the following option to model a negligibly (geometrically) thin layer of adhesive using a traction-separation-based response: *COHESIVE SECTION, RESPONSE=TRACTION SEPARATION Use the following option to use cohesive elements as gaskets and/or small adhesive patches: *COHESIVE SECTION, RESPONSE=GASKET |
| ABAQUS/CAE Usage: | Property module: Create Section: select Other as the section Category and Cohesive as the section Type: Response: Continuum, Traction Separation, or Gasket |
You assign the name of a material definition to a particular element set. The constitutive behavior for this element set is defined entirely by the constitutive thickness of the cohesive layer (discussed in “Specifying the constitutive thickness” in “Defining the cohesive element's initial geometry,” Section 18.5.4) and the material properties referring to the same name.
The constitutive behavior of the cohesive elements can be defined either in terms of a material model provided in ABAQUS or a user-defined material model (see “User-defined mechanical material behavior,” Section 12.8.1). When cohesive elements are used in applications involving a finite-thickness adhesive, any available material model in ABAQUS, including material models for progressive damage, can be used. For applications involving gasket and/or small finite-thickness adhesive patches, any material model that can be used with one-dimensional elements (such as beams, trusses, and rebars), including material models for progressive damage, can be used. For further details, see “Defining the constitutive response of cohesive elements using a continuum approach,” Section 18.5.5. For applications in which the behavior of cohesive elements is defined directly in terms of traction versus separation, the response can be defined only in terms of a linear elastic relation (between the traction and the separation) along with progressive damage (see “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6).
To define the constitutive behavior of cohesive elements, you assign the name of a material model to a particular element set through the section definition. The actual material model for a user-defined material model is defined in user subroutine UMAT in ABAQUS/Standard or VUMAT in ABAQUS/Explicit.
| Input File Usage: | *COHESIVE SECTION, ELSET=name, MATERIAL=name |
| ABAQUS/CAE Usage: | Property module: cohesive section editor: Material: name |
Cohesive elements are used to bond two different components. Often the cohesive elements completely degrade in tension and/or shear as a result of the deformation. Subsequently, the components that are initially bonded together by cohesive elements may come into contact with each other. Approaches for modeling this kind of contact include the following:
In certain situations this kind of contact can be handled by the cohesive element itself. By default, cohesive elements retain their resistance to compression even if their resistance to other deformation modes is completely degraded. As a result, the cohesive elements resist interpenetration of the surrounding components even after the cohesive element has completely degraded in tension and/or shear. This approach works best when the top and the bottom faces of the cohesive element do not displace tangentially by a significant amount relative to each other during the deformation. In other words, to model the situation described above, the deformation of the cohesive elements should be limited to “small sliding.”
Another possible approach is to define contact between the surfaces of the surrounding components that could potentially come into contact and to delete the cohesive elements once they are completely damaged. Thus, contact is modeled throughout the analysis. This approach is not recommended if the geometric thickness of the cohesive elements in the model is very small or zero (the geometric thickness of the cohesive elements may be different from the constitutive thickness you specify while defining the section properties of the cohesive elements—see “Specifying the constitutive thickness” in “Defining the cohesive element's initial geometry,” Section 18.5.4) because contact will effectively cause nonphysical resistance to compression of the cohesive layer while the cohesive elements are still active. If frictional contact is modeled, there may also be nonphysical shearing forces.
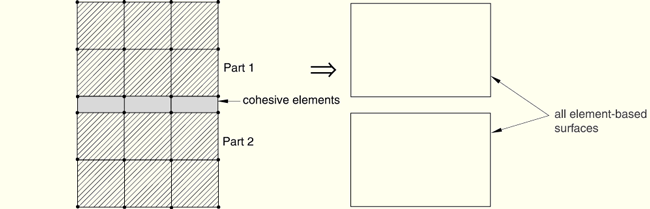
This is the behavior that will occur by default with the general contact algorithm in ABAQUS/Explicit. Figure 18.5.3–4, Figure 18.5.3–5, and Figure 18.5.3–6 show the default surface for general contact. This surface:
is insensitive to whether the cohesive elements and neighboring elements share nodes, are tied together, or are not connected; and
does not include faces of cohesive elements.
| Input File Usage: | Use the following options to add the top and bottom faces of the cohesive elements to the default general contact surface (the cohesive elements are included in the element set COH_ELEMS): |
*SURFACE, NAME=DEFAULT_PLUS_COH , COH_ELEMS, *CONTACT INCLUSIONS DEFAULT_PLUS_COH, |
| ABAQUS/CAE Usage: | Any module except Sketch, Job, and Visualization: Tools |
Interaction module: Create Interaction: General contact (Explicit): Included surface pairs: Selected surface pairs: Edit, select the surfaces in the columns on the left, and click the arrows in the middle to transfer them to the list of included pairs |
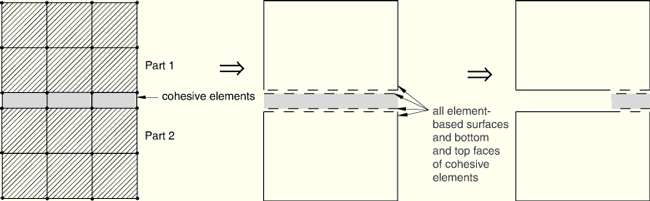
For general contact in ABAQUS/Explicit, yet another approach for modeling contact between the surrounding structures involves activating contact only when the cohesive elements are completely degraded and deleted from the model (see “Maximum degradation and choice of element removal” in “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6). For this approach the cohesive elements must share nodes with the neighboring element and the general contact definition must include surfaces on the top and bottom faces of the cohesive elements, as shown in Figure 18.5.3–8.
Figure 18.5.3–8 Surfaces that are involved in general contact when cohesive elements are included in the surface definition and erosion is used.
| Input File Usage: | Use the following options to include the top and bottom faces of the cohesive elements in the general contact definition (the cohesive elements are included in the element set COH_ELEMS): |
*SURFACE, NAME=gc_surf , COH_ELEMS, *CONTACT *CONTACT INCLUSIONS gc_surf, |
| ABAQUS/CAE Usage: | Any module except Sketch, Job, and Visualization: Tools |
Interaction module: Create Interaction: General contact (Explicit): Included surface pairs: Selected surface pairs: Edit, select the surfaces in the columns on the left, and click the arrows in the middle to transfer them to the list of included pairs |
The stable time increment for a cohesive element in ABAQUS/Explicit is equal to the time, ![]() , required for a stress wave to travel across the constitutive thickness,
, required for a stress wave to travel across the constitutive thickness, ![]() , of the cohesive layer:
, of the cohesive layer:
![]()
![]()
For cases in which the constitutive response is defined in terms of traction versus separation, the slope of the traction versus separation relationship is ![]() and the density is specified as mass per unit area rather than per unit volume:
and the density is specified as mass per unit area rather than per unit volume: ![]() (see “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6, for further details on this issue). Therefore, for traction versus separation the expression for the time increment becomes
(see “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6, for further details on this issue). Therefore, for traction versus separation the expression for the time increment becomes
![]()
It is quite common that the time increment of cohesive elements will be significantly less than that of the other elements in the model, unless you take some action to alter one or more of the factors influencing the time increment. This requires some judgement on your part. The following discussions provide some recommendations for controlling the time increment for the different methods of defining the material response. However, ABAQUS/Standard may be preferable in some applications where it is necessary to model a thin, stiff cohesive layer without approximations.
For constitutive response defined in terms of a continuum or uniaxial stress-state approach, the ratio of the stable time increment of the cohesive elements to that of the other elements is given by
increasing the constitutive thickness, ![]() ;
;
increasing the density, ![]() ;
;
reducing the stiffness, ![]() ; or
; or
some combination of the above.
For constitutive response defined in terms of traction versus separation, the ratio of the stable time increment of the cohesive elements to that for the other elements is given by
One way to ensure that the cohesive elements will have no adverse effect on the stable time increment is to choose material properties such that ![]() , which implies
, which implies
![]()
![]()
![]()
In many problems cohesive elements are modeled as undergoing progressive damage leading to failure. The modeling of progressive damage involves softening in the material response, which is known to lead to convergence difficulties in an implicit solution procedure, such as in ABAQUS/Standard. Convergence difficulties may also occur during unstable crack propagation, when the energy available is higher than the fracture toughness of the material. Several methods are available to help avoid these convergence problems.
ABAQUS/Standard provides a viscous regularization capability that helps in improving the convergence for these kinds of problems. This capability is discussed in detail in “Using viscous regularization with cohesive elements in ABAQUS/Standard” in “Section controls,” Section 13.1.4, and “Viscous regularization in ABAQUS/Standard” in “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6.
Another approach to help convergence behavior is the use of automatic stabilization (see “Static stress analysis,” Section 6.2.2, and “Solving nonlinear problems,” Section 8.2.1, for further details), which is useful when a problem is unstable due to local instabilities. Generally, if sufficient viscous regularization is used (as measured by the viscosity coefficient—see “Viscous regularization in ABAQUS/Standard” in “Defining the constitutive response of cohesive elements using a traction-separation description,” Section 18.5.6, for further details), the use of the automatic stabilization technique is not necessary. In problems where a small amount or no viscous regularization is used, automatic stabilization will improve the convergence characteristics.
The use of nondefault solution controls (see “Commonly used control parameters,” Section 8.3.2, and “Convergence criteria for nonlinear problems,” Section 8.3.3, for further details) and activation of the line search technique (“Improving the efficiency of the solution by using the line search algorithm” in “Convergence criteria for nonlinear problems,” Section 8.3.3) may be useful in improving the solution efficiency.