Products: ABAQUS/Standard ABAQUS/Explicit ABAQUS/CAE
Spring-like elastic connector behavior:
can be defined in any connector with available components of relative motion;
can be specified for each available component of relative motion independently, in which case the behavior can be linear or nonlinear;
can be specified as dependent on relative positions or constitutive motions in several local directions; and
can be specified for all available components of relative motion as coupled linear elastic behavior.
The directions in which the forces and moments act and the displacements and rotations are measured are determined by the local directions as described in “Connection-type library,” Section 17.1.5, for each connection type.
In the simplest case of linear uncoupled elasticity you define the spring stiffnesses for the selected components (i.e., ![]() for component 1,
for component 1, ![]() for component 2, etc.), which are used in the equation
for component 2, etc.), which are used in the equation
![]()
| Input File Usage: | Use the following options to define linear uncoupled elastic connector behavior: |
*CONNECTOR BEHAVIOR, NAME=name *CONNECTOR ELASTICITY, COMPONENT=component number, DEPENDENCIES=n |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
In the linear coupled case you define the spring stiffness matrix components, ![]() , which are used in the equation
, which are used in the equation
![]()
| Input File Usage: | Use the following options to define linear coupled elastic connector behavior: |
*CONNECTOR BEHAVIOR, NAME=name *CONNECTOR ELASTICITY, DEPENDENCIES=n |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
For nonlinear elasticity you specify forces or moments as nonlinear functions of one or more available components of relative motion, ![]() . These functions can also depend on temperature and field variables. See “Input syntax rules,” Section 1.2.1, for further information about defining data as functions of temperature and field variables.
. These functions can also depend on temperature and field variables. See “Input syntax rules,” Section 1.2.1, for further information about defining data as functions of temperature and field variables.
By default, each nonlinear force or moment function depends only on the displacement in the direction of the specified component of relative motion.
| Input File Usage: | Use the following options: |
*CONNECTOR BEHAVIOR, NAME=name *CONNECTOR ELASTICITY, COMPONENT=component number, NONLINEAR, DEPENDENCIES=n |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
Alternatively, the functions can depend on the relative positions or constitutive displacements/rotations in several component directions, as described in “Defining connector properties to depend on local directions” in “Connector behavior,” Section 17.2.1. In this case the operator matrices are unsymmetric when ![]() , for
, for ![]() , and unsymmetric matrix storage and solution may be needed in ABAQUS/Standard to improve convergence. The specified component of relative motion cannot appear in the list of independent components.
, and unsymmetric matrix storage and solution may be needed in ABAQUS/Standard to improve convergence. The specified component of relative motion cannot appear in the list of independent components.
| Input File Usage: | Use the following options to define nonlinear elastic connector behavior that depends on components of relative position: |
*CONNECTOR BEHAVIOR, NAME=name *CONNECTOR ELASTICITY, COMPONENT=component number, NONLINEAR, INDEPENDENT COMPONENTS=POSITION, DEPENDENCIES=n Use the following options to define nonlinear elastic connector behavior that depends on components of constitutive displacements or rotations: *CONNECTOR BEHAVIOR, NAME=name *CONNECTOR ELASTICITY, COMPONENT=component number, NONLINEAR, INDEPENDENT COMPONENTS=CONSTITUTIVE MOTION, DEPENDENCIES=n |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
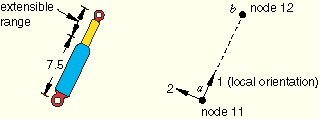
The combined connector in Figure 17.2.2–1 has two available components of relative motion: the relative displacement along the 1-direction (from the SLOT connection) and the rotation around the 1-direction (from the REVOLUTE connection)—see “Connection-type library,” Section 17.1.5.
Thus, the connector components of relative motion 1 and 4 can be used to specify connector behavior. To define a nonlinear torsional spring to resist the relative rotation between the top and the bottom connection point around the local 1-direction, use the following input:*CONNECTOR SECTION, ELSET=shock, BEHAVIOR=sbehavior slot, revolute ori, *CONNECTOR BEHAVIOR, NAME=sbehavior *CONNECTOR ELASTICITY, COMPONENT=4, NONLINEAR -900., -0.7 0., 0.0 1250., 0.7
Although no elastic coupling is assumed to occur between the two available components of relative motion, you could replace the nonlinear moment versus rotation data with coupled linear elastic behavior to define the rotational stiffness around the shock's axis coupled to the axial displacement.
In another application this same connector may have coupled linear elastic behavior, in the sense that relative rotation and sliding affect each other through a linear coupling. To define a translational stiffness of 2000.0 units, the ![]() constant (the 1st entry of a symmetric matrix) is entered in the connector elasticity definition. To define a torsional stiffness of 1000.0 units, the
constant (the 1st entry of a symmetric matrix) is entered in the connector elasticity definition. To define a torsional stiffness of 1000.0 units, the ![]() constant (the 10th entry of a symmetric matrix) is entered; and to define a coupling stiffness of 50.0 units between the available rotation and displacement, the
constant (the 10th entry of a symmetric matrix) is entered; and to define a coupling stiffness of 50.0 units between the available rotation and displacement, the ![]() constant (the 7th entry) is entered.
constant (the 7th entry) is entered.
*CONNECTOR ELASTICITY 2000.0, , , , , , 50.0, 0.0, 1000.0, , , , , , , , , ,
Rigid-like elastic connector behavior can be used to make an otherwise available component of relative motion rigid. Consider a CARTESIAN connector that has no intrinsic kinematic constraints. If rigid behavior is specified in the local 2- and 3-directions, the connector will behave in a similar fashion to a SLOT connector.
This technique of using connectors with available components of relative motion for which rigid behavior is specified instead of connectors with intrinsically kinematic constraints is particularly useful when you need to:
customize the constrained components in a connector with available components of relative motion; for example, you can constrain the local 1- and 2-directions in a CARTESIAN connector to define a SLOT-like connector in the 3-direction;
define rigid plastic behavior (see “Connector plastic behavior,” Section 17.2.6); or
define rigid damage behavior (see “Connector damage behavior,” Section 17.2.7).
For example, if you use a SLOT connector, plasticity and damage behavior cannot be specified in the intrinsically constrained 2- and 3-directions. To resolve the issue, you can use a CARTESIAN connector with rigid behavior in components 2 and 3 as discussed above and then define rigid plasticity (and/or damage) in these components. See the examples in “Connector plastic behavior,” Section 17.2.6, for illustrations.
In ABAQUS/Standard an overconstraint may occur if a rigid component is defined in the same local direction as an active connector stop, connector lock, or specified connector motion.
| Input File Usage: | Use the following option to define rigid connector behavior for a specified component of relative motion: |
*CONNECTOR ELASTICITY, RIGID, COMPONENT=n Use the following option to define rigid connector behavior for multiple specified components of relative motion: *CONNECTOR ELASTICITY, RIGID data line listing components to be made rigid Use the following option to define rigid connector behavior for all available components of relative motion: *CONNECTOR ELASTICITY, RIGID (no data lines) |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
Available components of relative motion with connector elasticity use the linearized elastic stiffness from the base state. In direct-solution steady-state dynamic and subspace-based steady-state dynamic analyses, the linear elastic stiffness defined by an uncoupled connector elasticity behavior may be frequency dependent.
The ABAQUS output variables available for connectors are listed in “ABAQUS/Standard output variable identifiers,” Section 4.2.1, and “ABAQUS/Explicit output variable identifiers,” Section 4.2.2. The following output variables are of particular interest when defining elasticity in connectors:
CU | Connector relative displacements/rotations. |
CUE | Connector elastic displacements/rotations. |
CEF | Connector elastic forces/moments. |