Products: ABAQUS/Standard ABAQUS/Explicit ABAQUS/CAE
Connector behavior:
can be defined for connection types with available components of relative motion;
can incorporate simple spring, dashpot, and node-to-node contact as particular applications;
may include linear or nonlinear force versus displacement and force versus velocity behavior for the unconstrained relative motion components;
can include uncoupled or coupled behavior specifications;
can allow frictional force in an unconstrained component of relative motion to be generated by any force or moment in the connection;
can allow for plasticity definitions for individual components or coupled plasticity definitions using user-defined yield functions;
can be used to specify sophisticated damage mechanisms with various damage evolution laws;
can provide user-defined locking criteria to lock in the current position all relative motion in the connector element or a single unconstrained component of relative motion; and
can be used to specify failure of the connector element.
You can assign the name of a connector behavior to particular connector elements.
| Input File Usage: | Use the following options to define the connector behavior: |
*CONNECTOR SECTION, ELSET=name, BEHAVIOR=behavior name *CONNECTOR BEHAVIOR, NAME=behavior name |
| ABAQUS/CAE Usage: | Interaction module: Create Connector Property: Name: connector property name: Behavior Options, Add Create Connector: Property: connector property name |
Connector behaviors allow for modeling of the following types of effects:
spring-like elastic behavior;
rigid-like elastic behavior;
dashpot-like (damping) behavior;
friction;
plasticity;
damage;
stops;
locks; and
failure.
uncoupled: the behavior is specified separately in individual available components of relative motion;
coupled: all or several of the available components of relative motion are used simultaneously in a coupled manner to define the behavior; or
combined: a combination of both uncoupled and coupled definitions are used simultaneously.
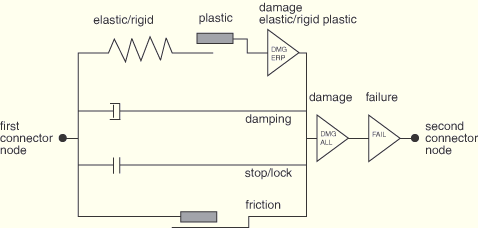
A conceptual model illustrating how connector behaviors interact with each other is shown in Figure 17.2.1–1.
Most behaviors (elasticity, damping, stops, locks, friction) act in parallel. Plasticity models are always defined in conjunction with spring-like or rigid-like elasticity definitions. Degradation due to damage can be specified either for the elastic-plastic or rigid-plastic response alone or for the entire kinetic response in the connector. The failure behavior will apply to the entire connector response.Multiple definitions for the same behavior type are permitted. For example, if connector elasticity (or damping) is defined several times in an uncoupled fashion for the same available component of relative motion, in a coupled fashion, or in both fashions, the spring-like (or dashpot-like) responses are added together. Multiple definitions of friction, plasticity, and damage behaviors are permitted as long as the rules outlined in the corresponding behavior sections are followed. Multiple uncoupled stop and lock definitions for the same component are permitted, but only one will be enforced at a time.
In many cases connector behavior is specified in an uncoupled manner in individual available components of relative motion. Coupled behavior can be defined for all or some of the available components of relative motion in a connector.
For coupled plasticity, damage, and, in certain situations, friction behavior, additional functions describing the nature of the coupling effects must be defined (see “Connector functions for coupled behavior,” Section 17.2.4). These functions do not define a behavior by themselves but are used as tools for building a desired behavior. For example, these functions may be used to define:
sophisticated yield functions in the connector force space for coupled plasticity behavior;
friction-generating contact forces for friction behavior; or
force or relative motion magnitude measures needed for damage behavior specifications.
| Input File Usage: | Use the following input to define uncoupled behavior: |
*CONNECTOR BEHAVIOR OPTION, COMPONENT=nUse the following input to define coupled behavior: *CONNECTOR BEHAVIOR OPTION |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
In all nonlinear uncoupled connector kinetic behaviors the independent variable is the connector available component in the direction for which the response is defined. When modeling the following connector behaviors, the properties can also depend on relative positions or constitutive displacements/rotations in several component directions:
connector elasticity,
connector damping,
connector derived components, and
connector friction.
| Input File Usage: | Use the following input to specify that the connector behavior properties are dependent on components of relative position included in the behavior definition: |
*CONNECTOR BEHAVIOR OPTION, INDEPENDENT COMPONENTS=POSITION (default) Use the following input to specify that the connector behavior properties are dependent on components of constitutive relative displacements or rotations included in the behavior definition: *CONNECTOR BEHAVIOR OPTION, INDEPENDENT COMPONENTS=CONSTITUTIVE MOTION In either case the first data line identifies the independent component numbers to be used in determining the dependencies, and the additional data for the connector behavior definition begin on the second data line. |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
In many connector behavior definitions, material-like behavior has a reference position where the force or moment is zero, which is different from the initial position. This is the case, for example, in a spring that has nonzero force or moment in the initial configuration. In these situations the most convenient way to define the connector behavior is relative to the nominal or reference geometry where the forces or moments vanish.
You can define the translational or angular positions at which constitutive forces and moments are zero by specifying up to six reference values (one per component of relative motion): three lengths and three angles (in degrees). The reference lengths and angles affect only spring-like elastic connector behavior and, if the friction-generating contact force (moment) is a function of the relative displacement (rotation), connector friction behavior. By default, the reference lengths and angles are the length and angle values determined from the initial geometry. See “Connection-type library,” Section 17.1.5, for the meaning of the reference lengths and angles for each connection type.
| Input File Usage: | *CONNECTOR CONSTITUTIVE REFERENCE length 1, length 2, length 3, angle 1, angle 2, angle 3 |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
In many cases connectors are precompressed or preextended when installed in assemblies. In such cases the connector force is nonzero in the initial configuration. While nonlinear elasticity could be used to define nonzero force in the initial configuration, it is often more convenient to specify a (linear) spring stiffness plus a reference length at which the force or moment is zero. For example, linear uncoupled elastic behavior defined with the connection type AXIAL would have force given by the equation
![]()
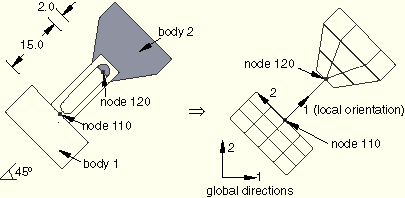
Assume the nonlinear torsional spring in Figure 17.2.1–2 has zero moment at an angle of 22.5°. Therefore, the elastic response of the torsional spring should be measured relative to this reference angle, not the initial angle determined by the initial geometry.
To define a reference angle (in degrees) for the connector elastic behavior that is different from the initial angle, modify only the fourth data item (corresponding to component 4 of relative motion) in the input file presented in “Connectors: overview,” Section 17.1.1, as follows:*CONNECTOR BEHAVIOR, NAME=sbehavior ... *CONNECTOR CONSTITUTIVE REFERENCE , , , 22.5
In ABAQUS/Explicit kinematic constraints, stops, locks, and actuated motion in connector elements are treated with implicit time integration. By default, connector constitutive behavior (for example, elasticity, damping, and friction) is also integrated implicitly. The advantage of implicit time integration is that elements with these behaviors do not affect the stability or time incrementation of the analysis in any way. The default is implicit integration of the constitutive response.
In certain problems, such as single precision analyses with “soft” springs together with “stiff” springs (i.e., several orders of magnitude difference in spring stiffness) or soft springs together with kinematic constraints, implicit time integration of the constitutive response may lead to poor solution resolution. In this case you can specify a more traditional explicit time integration for the constitutive response. This explicit time integration may lead to a small improvement in computational performance. However, explicit integration of relatively stiff springs will reduce the global time increment size, since such connector elements are included in the stable time increment size calculation.
| Input File Usage: | Use the following option to specify implicit integration of the constitutive response: |
*CONNECTOR BEHAVIOR, INTEGRATION=IMPLICIT Use the following option to specify explicit integration of the constitutive response: *CONNECTOR BEHAVIOR, INTEGRATION=EXPLICIT |
| ABAQUS/CAE Usage: | Interaction module: connector property editor: Add |
In linear perturbation procedures (see “General and linear perturbation procedures,” Section 6.1.2) the connector element kinematics are linearized about the base state. Hence, linearized versions of kinematic constraints are applied, and the connector behavior is linearized about the state at the end of the previous general analysis step.
Connector element behaviors allow for proper modeling of most physical connection behaviors within a single connector element. However, in rare circumstances more complex connection behaviors may require multiple connector elements to be used in parallel or in series. You place connector elements in parallel by defining two or more connector elements between the same nodes. You place connectors in series by specifying additional nodes (most often in the same location as the nodes of interest) and then stringing connector elements between these nodes.
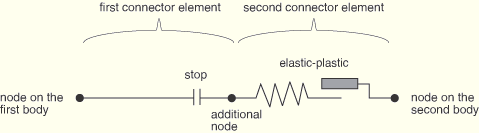
For example, assume that you would like to define a connector stop that exhibits elastic-plastic behavior upon contact. Since this is not permitted within the context of one connector behavior definition, you can circumvent the limitation by using two connector elements in series. This concept is illustrated in Figure 17.2.1–3.
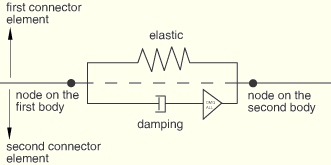
The first connector defines the stop, and the second defines the elastic-plastic behavior. Since both elements are subject to the same load (because they are in series), the desired behavior is obtained.Connectors in parallel can be used as well to model complex kinetic behavior. For example, assume that you need to define an elastic-viscous connector with spring-like and dashpot-like behaviors in parallel (for example, the strut in an automotive suspension). Assume that damage can occur only in the dashpot once it is stretched/compressed beyond specified limits. Since this is not permitted within the context of one connector behavior definition, you can circumvent the limitation by using two connector elements in parallel. This concept is illustrated in Figure 17.2.1–4.
The first connector defines the elastic behavior, and the second defines the dashpot behavior. Since the two connector elements are in parallel, they undergo the same motion (stretching/compression). A motion-based damage behavior (see “Connector damage behavior,” Section 17.2.7) can be used to degrade the entire behavior in the second element. Thus, only the dashpot behavior will eventually degrade.