Product: ABAQUS/Standard
The jointed material model is intended to provide a simple, continuum model for materials containing a high density of parallel joint surfaces in different orientations. The spacing of the joints of a particular orientation is assumed to be sufficiently close compared to characteristic dimensions in the domain of the model that the joints can be smeared into a continuum of slip systems. An obvious application is the modeling of geotechnical problems where the medium of interest is composed of significantly faulted rock. In this context, models similar to the one described next have been proposed in the past; see, for example, the model formulated by Zienkiewicz and Pande (1977).
The model implemented in ABAQUS/Standard provides for opening of the joints, or frictional sliding of the joints, in each of these systems (a “system” in this context is a joint orientation in a particular direction at a material calculation point). In addition to the joint systems, the model includes a bulk material failure mechanism. This is based on the Drucker-Prager failure criterion.
We consider a particular joint ![]() oriented by the normal to the joint surface
oriented by the normal to the joint surface ![]() . We define
. We define ![]() as two unit, orthogonal vectors in the joint surface. The local stress components are the pressure stress across the joint
as two unit, orthogonal vectors in the joint surface. The local stress components are the pressure stress across the joint
![]()
![]()
![]()
![]()
![]()
A linear strain rate decomposition is assumed, so that
whereWhen all joints at a point are closed, the elastic behavior of the material is assumed to be isotropic and linear. The material cannot be elastically incompressible (Poisson's ratio must be less than 0.5).
We use a stress-based joint opening criterion whereas joint closing is monitored based on strain. Joint system ![]() opens when the estimated pressure stress across the joint (normal to the joint surface) is no longer positive:
opens when the estimated pressure stress across the joint (normal to the joint surface) is no longer positive:
![]()
![]()
![]()
![]()
The shear response of open joints is governed by the shear retention parameter, ![]() , which represents the fraction of the elastic shear modulus retained when the joints are open (
, which represents the fraction of the elastic shear modulus retained when the joints are open (![]() =0 means no shear stiffness associated with open joints, while
=0 means no shear stiffness associated with open joints, while ![]() =1 corresponds to elastic shear stiffness in open joints; any value between these two extremes can be used).
=1 corresponds to elastic shear stiffness in open joints; any value between these two extremes can be used).
The failure surface for sliding on joint system ![]() is defined by
is defined by
The sliding of the different joint systems at a point is independent, in the sense that sliding on one system does not change the failure criterion or the dilation angle for any other joint system at the same point. The model provides for up to three joint systems at a point.
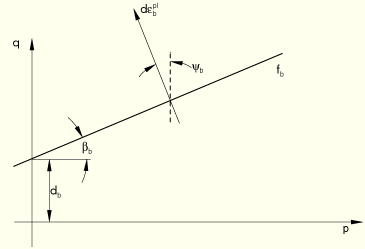
In addition to the joint systems, the model includes a bulk material failure mechanism. This is based on the Drucker-Prager failure criterion,
whereIf ![]() in any system the flow in that system is “nonassociated.” This implies that the material stiffness matrix is not symmetric, so that the unsymmetric matrix solution scheme should be invoked by the user. If the difference between
in any system the flow in that system is “nonassociated.” This implies that the material stiffness matrix is not symmetric, so that the unsymmetric matrix solution scheme should be invoked by the user. If the difference between ![]() and
and ![]() is not large, a symmetric approximation to the matrix can provide an acceptable rate of convergence of the equilibrium equations, and hence a lower overall solution cost. For this reason the unsymmetric solver is not automatically invoked for this material behavior. However, it is recommended for all cases where
is not large, a symmetric approximation to the matrix can provide an acceptable rate of convergence of the equilibrium equations, and hence a lower overall solution cost. For this reason the unsymmetric solver is not automatically invoked for this material behavior. However, it is recommended for all cases where ![]() and
and ![]() are very different on any joint system.
are very different on any joint system.