Products: ABAQUS/Standard ABAQUS/Explicit
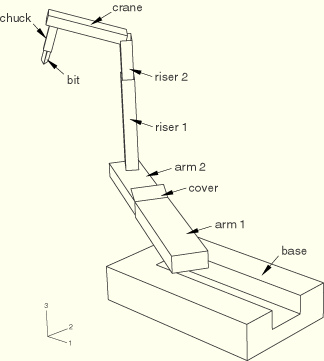
This verification problem tests the *CONNECTOR MOTION option for prescribing the relative motions of an articulated structure. A robotic-like crane assembly, modeled as rigid bodies connected together by means of connector elements, is subjected to actuating motions that drive the kinematic connections by specified amplitude curves. The actuating motions, including relative sliding and a two-axes rotation, cause the assembly to open up in a smooth sequence to form a riser crane. After a drilling and downward motion of the outermost body, the assembly closes down and reverts to its starting configuration. Tests are conducted both with no friction and with frictional effects in the connections.
Model:The model consists of rigid bodies and connector elements as described in the table below. Each rigid body pair in the table is connected by rotational and translational basic connector types with connector motion definitions in each of the available relative components of motion.
Table 1.9.3–1 Rigid bodies and connectors.
| Body 1 | Body 2 | Basic Connector Types | |
|---|---|---|---|
| Translational | Rotational | ||
| Base | Arm 1 | SLOT | REVOLUTE |
| Arm 1 | Cover | JOIN | REVOLUTE |
| Arm 1 | Arm 2 | SLOT | ALIGN |
| Arm 2 | Riser 1 | CARTESIAN | CARDAN |
| Riser 1 | Riser 2 | SLOT | ALIGN |
| Riser 2 | Crane | JOIN | REVOLUTE |
| Crane | Chuck | JOIN | REVOLUTE |
| Chuck | Bit | CARTESIAN | CARDAN |
The complete model in the fully open configuration with the rigid bodies labeled is shown in Figure 1.9.3–1.
ABAQUS/Standard input file.
ABAQUS/Standard input file with friction.
ABAQUS/Explicit input file.
ABAQUS/Explicit input file with friction.
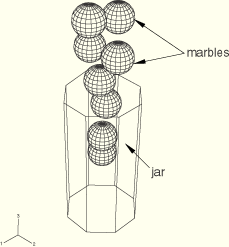
This problem, which is analyzed using only ABAQUS/Explicit, tests the *CONNECTOR STOP option for multiple intermittent contacts. Eight rigid spheres (marbles) are dropped into a rigid container (jar). The marbles move down through the jar and, after some jostling, come to rest in an equilibrium position at the bottom of the jar. The interaction between the marbles is modeled by defining a connector element for each marble pair, while the interaction between the marbles and the jar is modeled by defining a connector element between each marble and the jar.
Model:The jar and marbles are each modeled as rigid bodies. An analytical rigid surface of revolution is defined for each marble to represent the spherical outer surface for visualization purposes only. Each marble is dropped into the jar by defining an initial velocity in the direction of the axis of the jar and specifying a force on each rigid body reference node to simulate gravity. AXIAL connector types are defined for each pair of marbles, with the *CONNECTOR STOP option used to constrain the motion of each pair so that the marbles in the pair do not overlap. RADIAL-THRUST connector types are defined between each marble and the jar. These connectors constrain the motion of each marble so that the marble remains in the interior of the jar (i.e., it does not slip through the side walls or fall through the bottom of the jar) by using the *CONNECTOR STOP option.
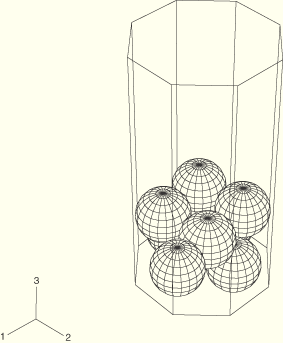
The marbles and jar in their initial and final configurations are shown in Figure 1.9.3–2 and Figure 1.9.3–3.
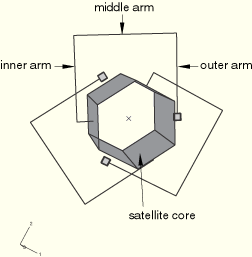
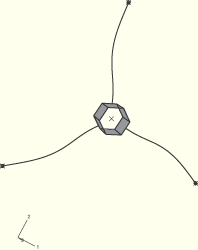
This problem, which is analyzed using both ABAQUS/Explicit and ABAQUS/Standard, tests the *CONNECTOR LOCK option for an articulated deformable structure. The complex sequence of motions analyzed is similar to that of a spinning satellite, with flexible boom arms, during its deployment. The satellite here consists of a core with large mass and rotary inertia and three comparatively light articulated arms. The arms undergo a series of large translations and rotations before reaching their final deployment position when they are locked into place. The connections between the components of each arm and between the arms and the satellite core are modeled with connector elements.
Model:The satellite core is modeled as a rigid body. The booms consist of three parts—the inner arm, the middle arm, and the outer arm—and are modeled with elastic beam elements. The satellite core is connected to each inner arm by means of a JOIN and a REVOLUTE connection. Each inner arm in turn is connected to its corresponding middle arm using the same translational and rotational connection types. Each middle arm is connected similarly to its corresponding outer arm. An initial rotating velocity about the global z-axis is specified for the entire model. In each of the connections described above, the rotations about the local 1-axis are constrained to lock into place once they reach their final deployment value of 180° using the *CONNECTOR LOCK option. In addition, torsional springs are defined in the connections between the inner arms and middle arms and between the middle arms and outer arms using the *CONNECTOR ELASTICITY option. The torsional springs act in addition to the centrifugal force to help the arms reach their final deployed configuration. Tests are conducted both with no friction and with frictional effects in the connections.
The complete model in the initial and final configurations is shown in Figure 1.9.3–4 and Figure 1.9.3–5.
ABAQUS/Standard input file.
ABAQUS/Standard input file with friction.
ABAQUS/Explicit input file.
ABAQUS/Explicit input file with friction.
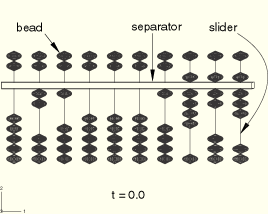
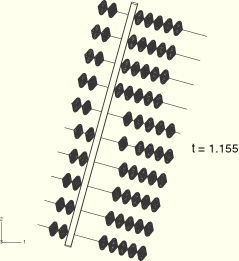
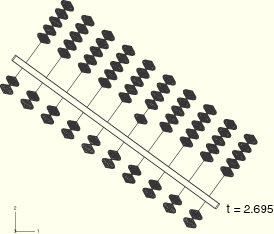
This problem, which is analyzed using only ABAQUS/Explicit, tests the *CONNECTOR STOP option for multiple intermittent contacts and kinematic constraints. An abacus consisting of a frame and beads is modeled. As the frame undergoes large motions, the beads slide up and down the sliders in the frame. Connector elements are used to model the contact interactions between the beads, the contact interactions between the beads and the frame, and the kinematic constraints between the beads and the frame.
Model:The abacus frame, consisting of sliders and a separator, is modeled as a single rigid body. Each of the beads is modeled as a rigid body, and an analytical rigid surface of revolution is used to model the surface of the bead for visualization purposes only. The frame is subjected to prescribed translations and rotations by means of specified amplitude curves. AXIAL connector types are defined between adjacent beads on the same slider, with the *CONNECTOR STOP option used to constrain the relative sliding motion between adjacent beads so that the beads do not overlap. Each bead is also connected to the frame by defining connector elements using the SLOT and ALIGN basic connection types. These elements ensure that each bead moves along its slider and rotates with the frame. The *CONNECTOR STOP option is specified for the connector elements between the frame and the beads next to the separator. The *CONNECTOR STOP option is also specified for the connector elements between the frame and the beads at the extreme end of each slider. These *CONNECTOR STOP options ensure that the beads slide only along the length of their respective sliders and prevent the beads from leaving the sliders.
The abacus in its initial, final, and two intermediate configurations is shown in Figure 1.9.3–6, Figure 1.9.3–7, Figure 1.9.3–8, and Figure 1.9.3–9.