Products: ABAQUS/Standard ABAQUS/Explicit ABAQUS/CAE
Connector actuation:
is meant to model situations, such as deployment maneuvers, where a motor attached to the body loads the connection with an internal force or moment history or a hydraulic system imposes a known motion;
can be used to fix available components of relative motion; and
consists of driving an available component of relative motion by a prescribed displacement (rotation) or by a specified force (moment).
Prescribing displacements/rotations for available components of relative motion that also include connector stop or connector lock behaviors may lead to overconstraints. ABAQUS will issue a warning message if an overconstraint occurs.
A common practice is to fix available components of motion. Such fixed motion conditions can be used to customize connection types for specific applications. As an example, the REVOLUTE connection type uses the local 1-direction as the shared revolute axis and, hence, the available component of relative motion. If, for convenience, a revolute connection about the local 3-direction were needed, you could fix the relative rotations about the local 1- and 2-directions in a CARDAN connection type. In doing so, a connection type identical to the REVOLUTE connection type would be created; however, the shared axis would be the local 3-direction instead of the local 1-direction.
An example is provided later in this section in which the pin part of a pin-in-slot connection is modeled with a CARDAN connection type with fixed rotations.
| Input File Usage: | Use the following option in the model portion of the input file to fix available connector components of relative motion: |
*CONNECTOR MOTION |
| ABAQUS/CAE Usage: | Load module: Create Boundary Condition: Step: Initial: Mechanical: Connector displacement |
You can specify a relative displacement, velocity, or acceleration between two parts in the connector's local directions in a manner similar to defining a boundary condition (see “Boundary conditions,” Section 19.3.1). You specify the connector element set name or connector element number; the component number identifying the available component of relative motion being actuated; and the value of the relative displacement, velocity, or acceleration.
You cannot specify the motion of connectors in a subspace dynamic analysis.
| Input File Usage: | Use the following option in the history portion of the input file to specify a relative displacement for a connector: |
*CONNECTOR MOTION, AMPLITUDE=name, OP=MOD or NEW, TYPE=DISPLACEMENT Use the following option in the history portion of the input file to specify a relative velocity for a connector: *CONNECTOR MOTION, AMPLITUDE=name, OP=MOD or NEW, TYPE=VELOCITY Use the following option in the history portion of the input file to specify a relative acceleration for a connector: *CONNECTOR MOTION, AMPLITUDE=name, OP=MOD or NEW, TYPE=ACCELERATION |
| ABAQUS/CAE Usage: | Load module: Create Boundary Condition: Mechanical: Connector displacement, Connector velocity, or Connector acceleration |
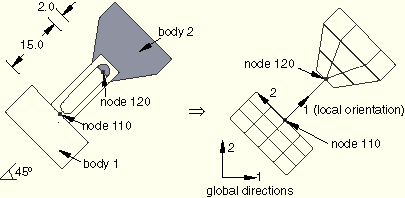
Figure 17.1.3–1 illustrates a pin-in-slot connection oriented at 45° from the global 1-axis modeled with element type CONN3D2.
The figure on the left is a schematic representation of the connection to be modeled, while the figure on the right is the finite element mesh. Displacements in the slot are allowed only along the line of the slot, and connection type SLOT is appropriate for enforcing these kinematics. Assume the pin and slot are constructed in such a way that the only rotation of the pin relative to the slot is along the local 3-direction. This is a revolute constraint; however, basic rotation connection type REVOLUTE uses the local 1-direction as the revolute axis. In this case connection type CARDAN combined with a specified constraint can be used to define a revolute-type connection with the appropriate revolute axis.For illustrative purposes assume the connection is actuated by a rotational velocity of ![]() radians per second around the pin's axis. Using input parametrization for convenience, the following lines are used:
radians per second around the pin's axis. Using input parametrization for convenience, the following lines are used:
*PARAMETER PI = 3.141592 rotangvel = PI/4 ... *ELEMENT, TYPE=CONN3D2, ELSET=pininslot 101, 11, 12 *CONNECTOR SECTION, ELSET=pininslot cardan, slot ori45, *CONNECTOR MOTION pininslot, 4 pininslot, 5 *ORIENTATION, NAME=ori45 0.707, 0.707, 0.0, -0.707, 0.707, 0.0 ... *STEP ... *CONNECTOR MOTION, TYPE=VELOCITY pininslot, 6, <rotangvel> ... *END STEP
You can specify concentrated loads applied to the available components of relative motion in a manner similar to defining concentrated loads for other elements in ABAQUS (see “Concentrated loads,” Section 19.4.2). However, connector loads are always follower loads that rotate with the rotation of the available components of relative motion as the connector element moves. You specify the connector element set name or connector element number, the component number identifying the available component of relative motion being loaded, and the value of the actuation force or moment.
| Input File Usage: | Use the following option in the history portion of the input file to specify a concentrated load for a connector: |
*CONNECTOR LOAD, AMPLITUDE=name, OP=MOD |
| ABAQUS/CAE Usage: | Load module: Create Load: Mechanical: Connector force or Connector moment |
Returning to the example in Figure 17.1.3–1, assume that the pin is pushed along the slot by a constant force of 1000.0 units (for example, through a hydraulic system). The following lines should be added to the input file:
*STEP ... *CONNECTOR LOAD pininslot, 1, 1000.0 ... *END STEP
Nonzero magnitude connector motions are allowed only in the eigenvalue buckling, direct-solution steady-state dynamic, and linear static perturbation procedures. Any nonzero magnitude specified during an eigenfrequency extraction procedure is ignored, and the specified available component of relative motion is held fixed. Connector motions cannot be used in any modal-based procedure.
In direct-solution steady-state dynamic analyses the real and imaginary parts of any available connector component of relative motion are either restrained or unrestrained simultaneously; it is physically impossible to have one part restrained and the other part unrestrained. ABAQUS/Standard will automatically restrain both the real and the imaginary parts of a component of relative motion even when only one part is prescribed specifically. The unspecified part will be assumed to have a perturbation magnitude of zero.
A nonzero prescribed connector motion in an eigenvalue buckling step will contribute to the incremental stress and, thus, will contribute to the differential initial stress stiffness. When prescribing nonzero connector motions, you must interpret the resulting eigenproblem carefully. See the discussion for boundary conditions in “Eigenvalue buckling prediction,” Section 6.2.3, for more details.
In steady-state dynamic analyses both real and imaginary connector loads can be applied in a manner similar to concentrated loads (see “Mode-based steady-state dynamic analysis,” Section 6.3.8; “Direct-solution steady-state dynamic analysis,” Section 6.3.4; and “Subspace-based steady-state dynamic analysis,” Section 6.3.9). Multiple connector load cases can be defined in random response analyses (see “Random response analysis,” Section 6.3.11) in the same manner as concentrated loads. Connector loads are ignored during an eigenfrequency extraction analysis.