Difference between revisions of "Cheers!"
Jump to navigation
Jump to search
Jessieshi97 (talk | contribs) |
Jessieshi97 (talk | contribs) |
||
| Line 12: | Line 12: | ||
[[File:Fig1.jpeg|thumb|Figure 1]] | [[File:Fig1.jpeg|thumb|Figure 1]] | ||
# Replicate the project found on [https://www.youtube.com/watch?v=tyv5rVPUGLU&t=21s youtube] but replace the beer bottle with soda glass bottle and a correct size glassware. There will also be no bottle rotating mechanism. The control for tilting mechanism will be changed to a pulley rope system outlined in Figure 1. | # Replicate the project found on [https://www.youtube.com/watch?v=tyv5rVPUGLU&t=21s youtube] but replace the beer bottle with soda glass bottle and a correct size glassware. There will also be no bottle rotating mechanism. The control for tilting mechanism will be changed to a pulley rope system outlined in Figure 1. | ||
| − | # Implementation of laser detector to correctly determine the | + | # Implementation of laser detector to correctly determine the stop signal using Arduino unit. |
# The glassware will tilt twice, the first time to fill the glassware with soda until the laser line and then tilt back a little. After the CO2 fizzing ends and liquid level drops, the system will tilt the glassware for a second time to completely fill the glassware without spilling. | # The glassware will tilt twice, the first time to fill the glassware with soda until the laser line and then tilt back a little. After the CO2 fizzing ends and liquid level drops, the system will tilt the glassware for a second time to completely fill the glassware without spilling. | ||
# Implement a control algorithm for a motor system that takes the laser signal as input and adjusts the tilt angle. | # Implement a control algorithm for a motor system that takes the laser signal as input and adjusts the tilt angle. | ||
| − | # The demo will include | + | # The demo will include demonstration on pouring soda using the complete assembled model. |
== Challenges == | == Challenges == | ||
Revision as of 22:31, 3 February 2017
Overview
Have you ever feel frustrated that the soda liquid line always rises higher than your expectation that it spilled all over your table? We are here to help. 'Cheers' is a automated soda pouring machine that takes a bottled soda and pour it into glassware without spilling the fizz. It utilizes 3D printing techniques for contructing the mechanical framework and Arduino to control the system. 'Cheers' tilts your soda bottle and glass to a perfect angle towards each other for the pouring mechanism to occur and will adjust angles as more soda accumulate in the glassware. The mechanism will stop after the beer height reached your desired level and voila, Cheers!
Team Members
- Jessie Shi (Tianjiao): Chemical Engineering, System Engineering ’18
- Haixiang Ren: System Engineering ’18
- Natalie Ng: TA
Objective

- Replicate the project found on youtube but replace the beer bottle with soda glass bottle and a correct size glassware. There will also be no bottle rotating mechanism. The control for tilting mechanism will be changed to a pulley rope system outlined in Figure 1.
- Implementation of laser detector to correctly determine the stop signal using Arduino unit.
- The glassware will tilt twice, the first time to fill the glassware with soda until the laser line and then tilt back a little. After the CO2 fizzing ends and liquid level drops, the system will tilt the glassware for a second time to completely fill the glassware without spilling.
- Implement a control algorithm for a motor system that takes the laser signal as input and adjusts the tilt angle.
- The demo will include demonstration on pouring soda using the complete assembled model.
Challenges
- 3D printing
- learn solidworks
- design the base, main structure, soda bottle and glassware holder.
- design two spools that could fit onto the stepper motor to control the rope length.
- Arduino
- Learn Arduino programming language.
- Implementing the Arduino code with laser and adjusting parameters to stable control the tilting mechanism.
- Hardware
- Stepper motor should keep control system stable during tilting mechanism and not going too fast/slow
- Design a circuit that connects the step motor, push button, resistors
- Optimal height of laser pointer should be determined as the glassware is tilted.
- Determine the rpm value on step motor as the spool pulls the fishing line, which controls the tilt angle.
- The soda bottle should be able to tilt an angle more than 90 degrees from its original position.
- Safety
- Electricity hazard when circuit interacts with liquid
- Rope might break
Budget
- Nema 17 Stepper Motor- x 2 = $24.98 (https://www.amazon.com/gp/product/B00PNEQI7W/ref=ox_sc_act_title_4?ie=UTF8&psc=1&smid=AWQBCGWISS7BL)
- Wall Adapter Power Supply- $5.69 (https://www.amazon.com/Wall-Adapter-Power-Supply-650mA/dp/B003XZSZWO/ref=sr_1_2?ie=UTF8&qid=1486105335&sr=8-2&keywords=Wall+Adapter+Power+Supply)
- KY-008 Laser x Laser Detector- $6.00 (+ $2.67 shipping) (https://www.elabpeers.com/ky-008-laser-x-laser-detector.html)
- Epoxy Glue – $7.28 (https://www.amazon.com/gp/product/B001Z3C3AG/ref=ox_sc_act_title_5?ie=UTF8&psc=1&smid=ATVPDKIKX0DER)
- Tack Switch Push Button – $1.99 (+$2.69 shipping) (http://www.ebay.com/itm/10x-12x12mm-Tactile-Switch-Momentary-NO-SPST-Button-for-Arduino-Raspberry-Pi-USA-/171223488665?hash=item27ddb71899:g:~5wAAMXQfvlSfdb6)
- Extension Cord - $7.99 (https://www.amazon.com/gp/product/B000HJDATM/ref=ox_sc_act_title_1?ie=UTF8&psc=1&smid=ATVPDKIKX0DER)
- Screw and Nut-$8.99 (https://www.amazon.com/gp/product/B005FZJ3M6/ref=ox_sc_act_title_2?ie=UTF8&psc=1&smid=A3J5BCLPLES7XX)
- Soda and glassware – $10 from walmart
- Arduino: provided
- 3D printing: procided
- Power Pro Fishing Braided line – 50 lbs: owned
Total: $ 78.82
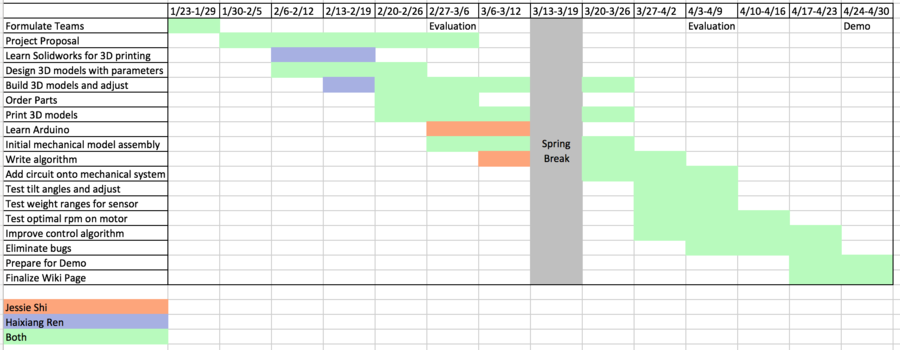
Gantt Chart