Difference between revisions of "Cheers!"
Jump to navigation
Jump to search
Natalie.ng (talk | contribs) |
Jessieshi97 (talk | contribs) |
||
| Line 11: | Line 11: | ||
# Replicate the project found on [https://www.youtube.com/watch?v=tyv5rVPUGLU&t=21s youtube] but replace the beer bottle with a soda glass bottle and appropriately sized glassware. There will also be no bottle rotating mechanism. The control for the tilting mechanism will be changed to a pulley rope system outlined in Figure 1. | # Replicate the project found on [https://www.youtube.com/watch?v=tyv5rVPUGLU&t=21s youtube] but replace the beer bottle with a soda glass bottle and appropriately sized glassware. There will also be no bottle rotating mechanism. The control for the tilting mechanism will be changed to a pulley rope system outlined in Figure 1. | ||
| + | # 3D printing of soda and glassware holder that they do not move. | ||
| + | # Soda should be poured into glassware aesthetical and without spilling. | ||
| + | # Algorithm which would let weight sensor approximate the height of liquid in glassware and then control tilt angles. | ||
| + | # If possible, conduct the same experiment but change the mexican glass soda bottle to canned ones. | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | ==Steps required to complete project== | ||
# Glassware can have two positions. Position 1 is perpendicular to the table (Figure 2) and position 2 is tilted by an angle to the horizon. The angle will be determined through experimentation so that, if the glassware were tilted to that angle, the poured liquid will take up approximately 2/3 of the total volume of glass. | # Glassware can have two positions. Position 1 is perpendicular to the table (Figure 2) and position 2 is tilted by an angle to the horizon. The angle will be determined through experimentation so that, if the glassware were tilted to that angle, the poured liquid will take up approximately 2/3 of the total volume of glass. | ||
# Soda bottle should be able to maintain 3 positions, each of which is shown in Figures 2, 3 and 4 respectively. The latter two angles will be determined through experimentation. Position 2 will be when the first drop of soda occurs and position 3 is when all the soda in the bottle can be poured out. | # Soda bottle should be able to maintain 3 positions, each of which is shown in Figures 2, 3 and 4 respectively. The latter two angles will be determined through experimentation. Position 2 will be when the first drop of soda occurs and position 3 is when all the soda in the bottle can be poured out. | ||
| Line 52: | Line 62: | ||
== Budget == | == Budget == | ||
| − | # [ | + | # [http://www.robotshop.com/en/hitec-hs-485hb-servo-motor.html HS-485HB Servo Motor] x 2: $29.98 + $2.99 shipping |
# [https://www.sparkfun.com/products/13879 Load Cell Amplifier HX-711]: $9.95 + $5.71 shipping | # [https://www.sparkfun.com/products/13879 Load Cell Amplifier HX-711]: $9.95 + $5.71 shipping | ||
# [https://www.sparkfun.com/products/13329 Load Cell, straight bar 10kg]: $6.95 | # [https://www.sparkfun.com/products/13329 Load Cell, straight bar 10kg]: $6.95 | ||
| Line 62: | Line 72: | ||
# [https://www.amazon.com/gp/product/B005FZJ3M6/ref=ox_sc_act_title_2?ie=UTF8&psc=1&smid=A3J5BCLPLES7XX Screw and Nut]: $8.99 | # [https://www.amazon.com/gp/product/B005FZJ3M6/ref=ox_sc_act_title_2?ie=UTF8&psc=1&smid=A3J5BCLPLES7XX Screw and Nut]: $8.99 | ||
# [https://www.walmart.com/ip/Coca-Cola-Cola-355mL/16940377 Coca-Cola Mexican Glass Bottle, 355 mL] x 6: $5.98 (purchase in Walmart store) | # [https://www.walmart.com/ip/Coca-Cola-Cola-355mL/16940377 Coca-Cola Mexican Glass Bottle, 355 mL] x 6: $5.98 (purchase in Walmart store) | ||
| + | # [https://www.walmart.com/ip/Coca-Cola-Classic-Cola-2-l/14940705 Coca-Cola 2L] x 2 = $2.00 (purchase in Walmart store) | ||
# Arduino: provided | # Arduino: provided | ||
# 3D printing: provided | # 3D printing: provided | ||
| Line 68: | Line 79: | ||
# Magnet Screw Driver tool kit - owned | # Magnet Screw Driver tool kit - owned | ||
# Glassware: owned | # Glassware: owned | ||
| − | Total: $ 98.09 | + | Total: $ 98.09? |
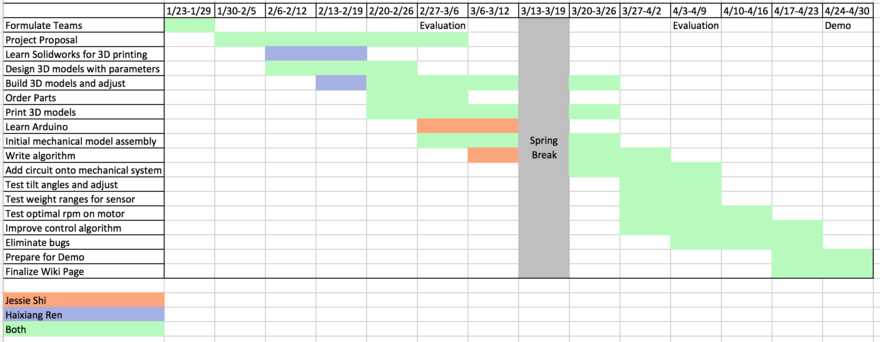
== Gantt Chart == | == Gantt Chart == | ||
Revision as of 07:23, 16 February 2017
Contents
Overview
Have you ever feel frustrated that the soda liquid line always rises higher than your expectation that it spilled all over your table? We are here to help. 'Cheers' is a automated soda pouring machine that takes a bottled soda and pour it into glassware without spilling the fizz. It utilizes 3D printing techniques for contructing the mechanical framework and Arduino to control the system. 'Cheers' tilts your soda bottle and glass to a angle towards each other to minimize the fizzing and the tilting mechanism will stop after the beer height reached your desired level and voila, Cheers!
Team Members
- Jessie Shi (Tianjiao): Chemical Engineering, System Engineering ’18
- Haixiang Ren: System Engineering ’18
- Natalie Ng: TA
Objectives

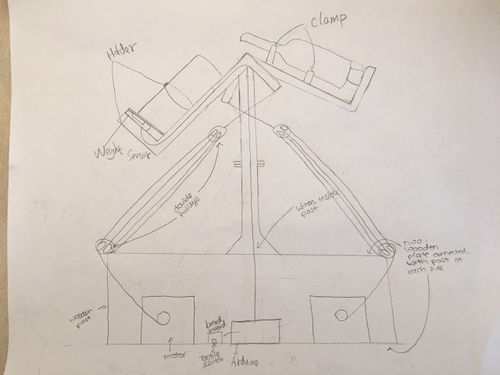
- Replicate the project found on youtube but replace the beer bottle with a soda glass bottle and appropriately sized glassware. There will also be no bottle rotating mechanism. The control for the tilting mechanism will be changed to a pulley rope system outlined in Figure 1.
- 3D printing of soda and glassware holder that they do not move.
- Soda should be poured into glassware aesthetical and without spilling.
- Algorithm which would let weight sensor approximate the height of liquid in glassware and then control tilt angles.
- If possible, conduct the same experiment but change the mexican glass soda bottle to canned ones.
Steps required to complete project
- Glassware can have two positions. Position 1 is perpendicular to the table (Figure 2) and position 2 is tilted by an angle to the horizon. The angle will be determined through experimentation so that, if the glassware were tilted to that angle, the poured liquid will take up approximately 2/3 of the total volume of glass.
- Soda bottle should be able to maintain 3 positions, each of which is shown in Figures 2, 3 and 4 respectively. The latter two angles will be determined through experimentation. Position 2 will be when the first drop of soda occurs and position 3 is when all the soda in the bottle can be poured out.
- There will be one pouring mechanism so that the glassware and soda bottles both tilt fast from position 1 (Figure 2) to position 2 (Figure 3) (and reach this position at the same time). Glassware is kept at position 2 and the soda bottle is tilted very slowly from position 2 to position 3 to pour the soda slowly into the glassware. When the liquid in the glassware reaches approximately 3 cm to its top, it will tilt back slowly to position 1 while the soda is still pouring. The glassware reaching position 1 and the soda bottle reaching position 3 should happen at the same time. This is when the pouring mechanism ends, after which the soda bottle will return quickly to position 1.
- Weight sensor will be used to estimate the amount of liquid in the glassware and thus control the tilting mechanism.
- Start of the program is initiated through pressing a push button.
- Wooden protective cover will be used to on top of the Arduino, motors and spools. Four pulleys will be used as shown in Figure 1 to eliminate the chances of electric shock. The wires to connect the weight sensor to the Arduino board will be inside the support stands (Figure 1).
- Fishing line with 65 lbs limit will be used to prevent the rope from breaking.
- All the soda from the bottle should be poured into the glassware, which would fill it 3 cm to the tip.
- The demo will include a demonstration of pouring soda using the completely assembled model.
- If time permits, we will try to modify the same mechanism for a soda can to increase the utility of the product.
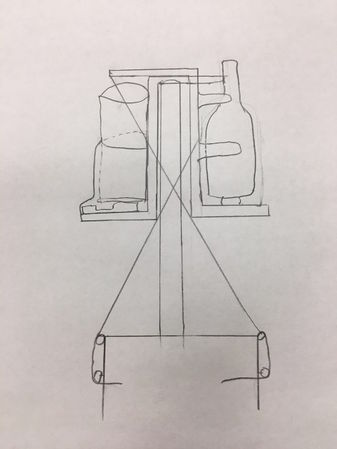
Figure 2: Both in position 1
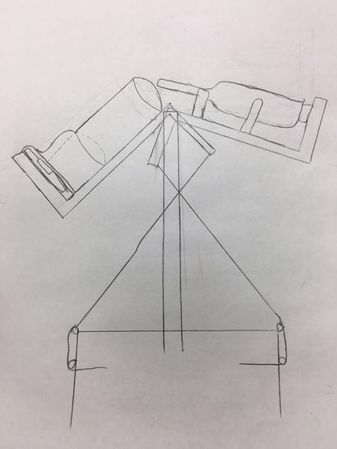
Figure 3: Both in position 2
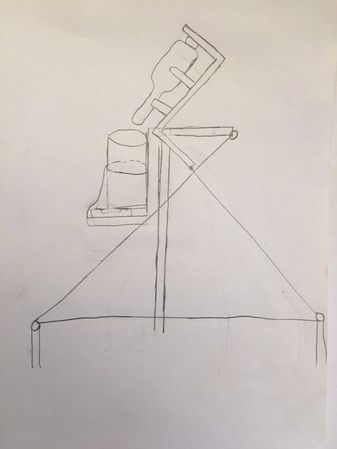
Figure 4: Glassware in position 1, soda bottle in position 3



Challenges
- 3D printing
- learn solidworks
- design specific dimensions of soda bottle, glassware holder and frame (we will have to print two parts of the frame and connect them together as 3D printing can only print a height of 6 inches)
- design two spools that could fit onto the stepper motor to control the rope length and four pulleys.
- build models using Solidworks and 3D print them.
- Arduino
- Learn Arduino programming language.
- Implementing the Arduino code with weight sensor and stepper motor.
- Debugging code and and adjusting parameters to control the tilting mechanism.
- Hardware
- Stepper motor should keep control system stable during tilting mechanism and not going too fast/slow
- Design a circuit that connects the step motor, push button, laser sensor onto Arduino.
- Find the various tilt angles outlined in the objectives section by conducting experiments (use tap water instead of soda).
- Determine the rpm value on step motor as the spool pulls the fishing line, which controls the tilt angle.
- The soda bottle should be able to tilt an angle more than 90 degrees (position 3) from its original position.
- Safety
- Electricity hazard when circuit interacts with liquid
- Rope might break
Budget
- HS-485HB Servo Motor x 2: $29.98 + $2.99 shipping
- Load Cell Amplifier HX-711: $9.95 + $5.71 shipping
- Load Cell, straight bar 10kg: $6.95
- Wall Adapter Power Supply: $5.69
- Epoxy Glue: $7.28
- Tack Switch Push Button: $1.99 + $2.69 shipping
- Extension Cord: $7.99
- Resistor Kit: $9.89
- Screw and Nut: $8.99
- Coca-Cola Mexican Glass Bottle, 355 mL x 6: $5.98 (purchase in Walmart store)
- Coca-Cola 2L x 2 = $2.00 (purchase in Walmart store)
- Arduino: provided
- 3D printing: provided
- Wooden base and wooden protection cover - from machine shop
- Power Pro Fishing Braided line – 65 lbs limit: owned
- Magnet Screw Driver tool kit - owned
- Glassware: owned
Total: $ 98.09?
Gantt Chart