Product: ABAQUS/Explicit
Various features of the *FIXED MASS SCALING and *VARIABLE MASS SCALING options are tested. Most of the analyses consist of a set of reference elements that are unscaled and another set of test elements whose masses are scaled to equal those of the reference elements. The response of the test elements should be identical to that of the reference elements.
B21 B22 B31 B32
C3D4 C3D6 C3D8R
CAX3 CAX4R
CPE3 CPE4R CPS3 CPS4R
M3D3 M3D4R MASS
R2D2 R3D3 R3D4 RAX2 ROTARYI
S3R S4R SAX1
These problems verify that the element mass matrices are generated properly for every element type that can be scaled. Several element types are tested in each input file. For each element type an element pair consisting of a reference element and test element with identical geometries is defined. The material properties of each element pair are identical with the exception of the densities. The densities of the test elements are scaled with the FACTOR parameter so that in the analysis their element mass matrices are identical to those of the reference elements. Each element pair is subject to equivalent displacements (and rotations in the case of beams and shells) such that their response is dynamic. Rebars are included for every element type that permits the inclusion of rebar. Tests of membranes and shells are performed with and without the *NODAL THICKNESS option. Reaction forces for constrained nodes of each pair of elements are output for comparison purposes.
Reaction force histories for nodes on each pair of test and reference elements are nearly identical. Slight differences exist because the bulk viscosity is based on the unscaled mass during the first increment. Every increment thereafter, the bulk viscosity is based on the scaled mass.
Two-dimensional and three-dimensional continuum elements.
Two-dimensional and three-dimensional beams and shells.
Elements with mass but no stable time increment.
The various techniques of mass scaling, via the TYPE and FACTOR parameters, are tested for the *FIXED MASS SCALING and *VARIABLE MASS SCALING options. In addition, the use of multiple mass scaling definitions is also tested. These problems consist of a set of reference elements and a set of test elements with identical geometries. The material properties of each set of reference and test elements are identical with the exception of the densities. The densities of the reference elements are scalar multiples of those of the test elements. The DT parameter is assigned a value so that the masses of the test elements are scaled to exactly equal those of the reference elements. Displacement boundary conditions are used to deform each pair of elements; however, the deformation is minimal, so the element stable time increments are not affected significantly.
Reaction force histories for nodes of each pair of the reference and test elements are nearly identical. Slight differences exist because the bulk viscosity is based on the unscaled mass during the first increment. Every increment thereafter, the bulk viscosity is based on the scaled mass. Furthermore, in cases in which variable mass scaling is specified, additional differences arise because of the continual scaling of the elements' masses throughout the step.
*FIXED MASS SCALING, TYPE=BELOW MIN option.
*VARIABLE MASS SCALING, TYPE=BELOW MIN option.
*FIXED MASS SCALING, TYPE=BELOW MIN option with a mass scaling factor.
*FIXED MASS SCALING, TYPE=UNIFORM option.
*VARIABLE MASS SCALING, TYPE=UNIFORM option.
*FIXED MASS SCALING, TYPE=UNIFORM option with a mass scaling factor.
*FIXED MASS SCALING, TYPE=SET EQUAL DT option.
*VARIABLE MASS SCALING, TYPE=SET EQUAL DT option.
*FIXED MASS SCALING, TYPE=SET EQUAL DT option with a mass scaling factor.
Multiple uniform mass scaling definitions with the *FIXED MASS SCALING option.
Multiple uniform mass scaling definitions with the *VARIABLE MASS SCALING option.
The *VARIABLE MASS SCALING option is used to perform mass scaling throughout a step. In this problem a group of elements is stretched such that they experience severe distortions. The *VARIABLE MASS SCALING option is used to prevent the stable time increment from decreasing below a specified value. Two tests are performed in which the mass scaling is performed at specified increments and at specified time intervals during the step. The stable time increment and percent change in total mass are output to monitor the mass scaling of the model.
Stable time increment histories show that they do not fall below the specified minimum. Time histories of the percent change in total mass show a continual increase, thereby verifying that mass is being scaled throughout the step.
Scaling is performed at specified increments.
Scaling is performed at specified time intervals.
Mass scaling definitions can be removed or propagated from step to step. Furthermore, the mass matrix of an element that has been scaled in a previous step can be propagated to a subsequent step or reinitialized to its original state. In this problem a combination of *FIXED MASS SCALING and *VARIABLE MASS SCALING definitions are defined over several steps to verify these mass scaling features for a multistep analysis. Reaction forces and the percent change in total mass of the model are output.
Reaction force histories for nodes of the test and reference elements are identical. Examination of the reaction forces and the percent change in total mass of the model verifies that mass scaling definitions are propagated and removed correctly across steps. Mass matrices are also propagated and reinitialized correctly.
Mass scaling can be defined globally or locally on an element set basis. A local mass scaling definition will override a global mass scaling definition for an element, as verified in this problem.
Mass scaling factor and element stable time increment histories verify that global mass scaling definitions are overwritten by local definitions for specified elements.
Local and global *FIXED MASS SCALING definitions.
Local and global *VARIABLE MASS SCALING definitions.
Mass scaling of rigid elements or deformable elements defined as a rigid body can be performed. Techniques for scaling rigid bodies are limited because these elements do not have an associated stable time increment (“Mass scaling,” Section 11.7.1 of the ABAQUS Analysis User's Manual).
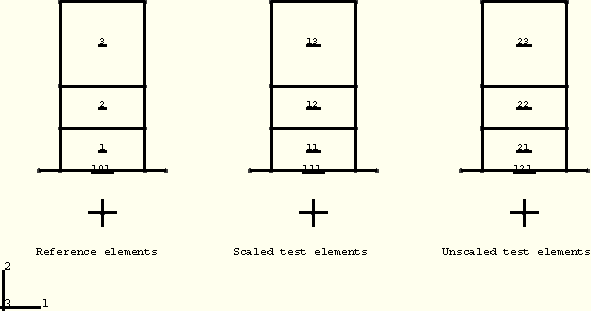
The following tests verify the use of the *FIXED MASS SCALING and *VARIABLE MASS SCALING options with rigid bodies. These problems consist of a set of reference elements and two sets of test elements with identical geometries, as shown in Figure 3.2.7–1. Each element set consists of two independent bodies that come into contact: a fixed rigid surface and a body consisting of a combination of rigid and deformable elements. The material properties of the reference and test elements are identical with the exception of the densities. The densities of both sets of test elements are identical, but they are scaled for one set to equal those of the reference elements.
Initial velocities are applied in the vertical direction so that impact with the fixed rigid surfaces (elements 101, 111, and 121) occurs. Reaction forces at the reference nodes of the fixed rigid surfaces are output for comparison purposes.
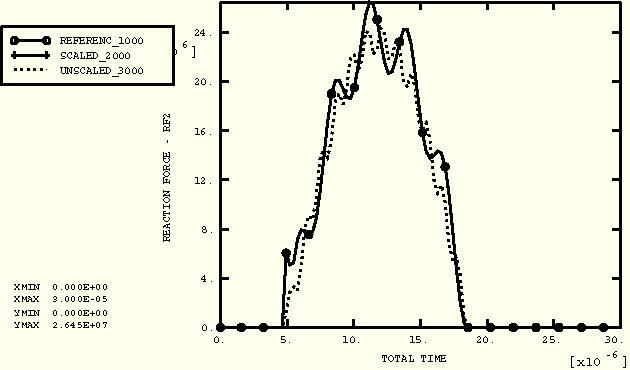
Vertical reaction force histories for the fixed rigid surfaces are nearly identical for the reference and scaled element sets, as shown in Figure 3.2.7–2. Very slight differences exist because the bulk viscosity is based on the unscaled mass during the first increment. Every increment thereafter, the bulk viscosity is based on the scaled mass.
Two-dimensional continuum elements defined as a rigid body and attached to two-dimensional continuum elements with the *FIXED MASS SCALING option applied only to the deformable elements.
Two-dimensional continuum elements defined as a rigid body and attached to two-dimensional continuum elements with the *FIXED MASS SCALING option applied to both deformable and rigid portions of the mesh.
Two-dimensional continuum elements defined as a rigid body and attached to two-dimensional continuum elements with the *FIXED MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh.
Rgid elements attached to two-dimensional continuum elements with the *FIXED MASS SCALING option applied only to the deformable elements.
Rigid elements attached to two-dimensional continuum elements with the *FIXED MASS SCALING option applied to both the deformable and rigid portions of the mesh.
Rigid elements attached to two-dimensional continuum elements with the *FIXED MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh.
Two-dimensional continuum elements defined as a rigid body and attached to two-dimensional continuum elements with the *VARIABLE MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh.
Rigid elements attached to two-dimensional continuum elements with the *VARIABLE MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh.
*FIXED MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh.
*FIXED MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh. Analysis using the general contact capability.
*VARIABLE MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh.
*VARIABLE MASS SCALING, TYPE=UNIFORM option applied to both the deformable and rigid portions of the mesh. Analysis using the general contact capability.
Rotary inertia elements attached to a rigid surface.
The contact forces resulting between two deformable bodies with kinematically enforced contact are functions of the masses at the nodes in contact, the magnitude of the time increment, and the penetration in the predicted configuration. These problems verify that the kinematic contact forces are calculated correctly when the densities for the contacting elements are scaled. Each problem consists of a set of reference elements and a set of test elements with identical geometries. Each set in turn consists of two independent bodies that come into contact. The material properties of the reference and test elements are identical with the exception of the densities. The densities of the test elements are scaled to equal those of the reference elements. Reaction force histories for nodes on the contacting bodies that are constrained are output for comparison purposes.
Reaction force histories for nodes on each pair of test and reference elements are nearly identical. Slight differences exist because the bulk viscosity is based on the unscaled mass during the first increment. Every increment thereafter, the bulk viscosity is based on the scaled mass.
CPE4R elements and the *FIXED MASS SCALING option.
CPE4R elements and the *VARIABLE MASS SCALING option.
C3D8R elements and the *FIXED MASS SCALING option.
C3D8R elements and the *VARIABLE MASS SCALING option.
Nodal masses affect the penalty contact algorithm less directly than they affect the kinematic contact algorithm. Penalty contact forces depend on the penalty stiffness and the penetration in the current configuration. The penalty stiffnesses for contact between deformable surfaces are assigned automatically to a fraction of the elastic stiffness of the most compliant parent elements of the surfaces. Therefore, mass scaling does not influence the penalty contact forces between deformable surfaces for a given amount of penetration. However, nodal masses are factored into the effect of the penalty stiffness on the stable time increment. The problems from the previous subsection are repeated here with penalty enforcement of the contact constraints to verify that mass scaling is accounted for properly in the effect of the penalty stiffness on the stable time increment.
The time increment decreases by about 4% during increments in which penalty contact forces are being transmitted. Some contact penetration can be observed in these tests, which is characteristic of the penalty contact method.
CPE4R elements and the *FIXED MASS SCALING option.
CPE4R elements and the *VARIABLE MASS SCALING option.
C3D8R elements and the *FIXED MASS SCALING option.
C3D8R elements and the *FIXED MASS SCALING option using the general contact capability.
C3D8R elements and the *VARIABLE MASS SCALING option.
C3D8R elements and the *VARIABLE MASS SCALING option using the general contact capability.