Products: ABAQUS/Standard ABAQUS/Explicit
B21 B21H B22 B31 B31H B31OS B31OSH B32 B32H
CAX3 CAX3H CAX4 CAX4H CAX4I CAX4IH CAX4R CAX6 CAX6M CAX6MH CAX8 CAX8H
CPE3 CPE3H CPE4 CPE4H CPE4I CPE4IH CPE4R CPE4RH CPE6 CPE6M CPE8 CPS3 CPS4 CPS4I CPS4R CPS6 CPS6M CPS8
C3D6 C3D6H C3D8 C3D8H C3D8R C3D8RH C3D10 C3D10M C3D15 C3D15H C3D15V C3D20 C3D20H C3D20R
FRAME2D FRAME3D
M3D3 M3D4 M3D4R M3D6 M3D8 MAX1 MAX2
PIPE31H R2D2 R3D4 R3D3 RAX2
S3R S4 S4R S8R SAX1 SAX2
Computation of rigid body mass properties, repositioning of the rigid body reference node at the center of mass of the rigid body.
This suite of problems tests the mass property computations of rigid bodies consisting of continuum and structural elements in ABAQUS/Standard analyses and continuum, structural and rigid elements in ABAQUS/Explicit analyses. Five different rigid body geometry cases are considered:
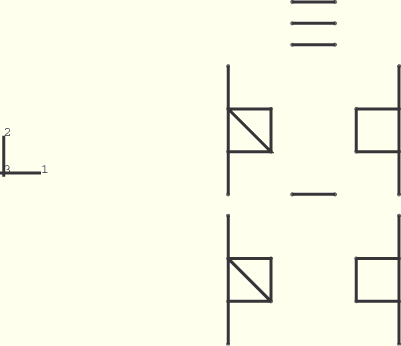
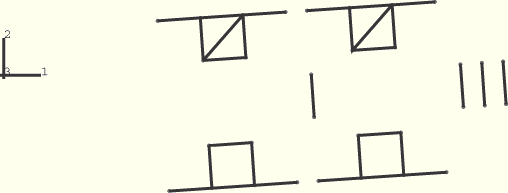
A two-dimensional planar rigid body consisting of beam, continuum, and truss elements (and rigid elements in ABAQUS/Explicit analyses).
A three-dimensional rigid body consisting of beam, continuum, and truss elements (and rigid elements in ABAQUS/Explicit analyses).
A three-dimensional rigid body consisting of beam, membrane, shell, and truss elements.
An axisymmetric rigid body consisting of continuum and shell elements (and rigid elements in ABAQUS/Explicit analyses).
A three-dimensional rigid body consisting of all of the elements included in geometry Cases 2 and 3, as well as a point mass element located at the rigid body reference node.
The computed mass properties of rigid bodies can be verified by checking the printed quantities in the data (.dat) file. Further quantitative and qualitative verification is accomplished by performing two analyses. In the first analysis each geometry case is subjected to a concentrated force of magnitude 1.0 × 106 in the x-direction acting at the rigid body reference node. In the second analysis each geometry case is subjected to a concentrated moment of magnitude 1.0 × 108 acting about the z-axis at the rigid body reference node.
For each geometry case the mass and inertia properties of the rigid body are found to match their analytical values closely. In Cases 1 and 4 the application of a concentrated force at the rigid body reference node does not cause any rotation of the rigid body about the out-of-plane axis, which verifies that the reference node has been positioned at the center of mass of the rigid body. Similarly for Cases 2, 3, and 5, for the concentrated force loading, there are no rotations observed about either the global x-, y-, or z-axes. The moment loading in each case causes large rigid body rotations about the reference node. The final rotated configuration in each case is found to be consistent with the geometry of the problem and the magnitude of the applied moment. The original and final configurations of the rigid body in Case 1 for the moment load case are shown in Figure 1.8.1–1 and Figure 1.8.1–2.
Case 1 for the force loading.
Case 1 for the force loading.
Case 1 for the force loading.
Case 1 for the force loading.
Case 1 for the moment loading.
Case 1 for the moment loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the moment loading.
Case 2 for the moment loading.
Case 3 for the force loading.
Case 3 for the force loading.
Case 3 for the force loading.
Case 3 for the moment loading.
Case 3 for the moment loading.
Case 4 for the force loading.
Case 4 for the force loading.
Case 4 for the force loading.
Case 4 for the force loading.
Case 4 for the force loading.
Case 4 for the moment loading.
Case 4 for the moment loading.
Case 5 for the force loading.
Case 5 for the moment loading.
Case 1 for the force loading.
Case 1 for the force loading.
Case 1 for the moment loading.
Case 1 for the moment loading.
Case 2 for the force loading.
Case 2 for the force loading.
Case 2 for the moment loading.
Case 2 for the moment loading.
Case 3 for the force loading.
Case 3 for the force loading.
Case 3 for the moment loading.
Case 3 for the moment loading.
Case 4 for the force loading.
Case 4 for the force loading.
Case 4 for the moment loading.
Case 4 for the moment loading.
Case 5 for the force loading.
Case 5 for the force loading.
Case 5 for the moment loading.
Case 5 for the moment loading.