Product: ABAQUS/Explicit
Three-dimensional penalty contact, accounting for penalty stiffness in the stable time increment, three-dimensional shell thickness in contact.
This problem tests the features listed but does not provide independent verification of the response.
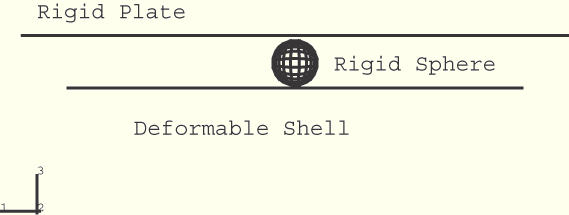
This example illustrates characteristics of penalty contact. The penalty method is a nondefault alternative to kinematic enforcement of contact constraints, and it is invoked by specifying MECHANICAL CONSTRAINT=PENALTY on the *CONTACT PAIR option. In this example the penalty method is used to enforce contact between three bodies: a rigid plate, a rigid sphere, and an originally flat shell. The initial configuration is shown in Figure 1.6.23–1. The rigid plate is fully constrained. The rigid sphere is initially motionless. The initial velocity of the shell body causes the sphere to be pinched between the other two bodies, and deformation of the shell eventually leads to contact between the shell and the rigid plate.
An analytical rigid surface is used to model the rigid plate. An element-based rigid surface defined by R3D4 elements is used to model the rigid sphere. A deformable surface is defined over the shell body. Contact between each combination of these surfaces is defined with three contact pairs.
It would be preferable to model the sphere as an analytical surface, since the element-based surface is a non-smooth approximation to the shape. However, analytical surfaces can act as master surfaces only, and this example requires the sphere to act as a slave surface; therefore, the sphere must be modeled with elements. Element-based rigid surfaces can act as slave surfaces with the penalty method, unlike with the kinematic contact method. This aspect of the penalty method allows contact modeling between rigid surfaces, such as between the rigid plate and the rigid sphere in this example. Having a rigid surface act, at least partially, as a slave surface often will improve contact enforcement for rigid-to-deformable contact because nodes of a pure master surface can penetrate slave facets without generating contact forces. In this example balanced master-slave weighting is used for contact between the rigid sphere and the shell. If kinematic contact were used to model contact between the sphere and the shell, the sphere would have to be weighted as a pure master surface and the sphere nodes would be allowed to penetrate the shell facets.
It is generally preferable to use an analytical rigid surface whenever possible, rather than an element-based rigid surface, since an element-based approximation to a smooth surface can contribute to noise in a solution if slave nodes from other surfaces slide across the element facets. However, this type of sliding is not significant in this problem.
Two sphere masses are considered for this example: 10–2 and 10–4. The mass of the rigid sphere does not influence the deformation of the shell significantly, but this mass is significant with respect to numerical stability considerations. The maximum penalty stiffness allowed for numerical stability is directly proportional to the contact mass and has a complex inverse dependence on the time increment. The contact mass corresponds approximately to the mass of the lighter rigid body or node of a deformable body involved in a contact constraint. Default penalty stiffnesses for contact involving one or two deformable surfaces are chosen to have a small effect (about 4% at most) on the element-by-element stable time increment for parent elements along the surface. The penalty stiffnesses that are chosen by default to enforce contact between rigid bodies do not influence the time increment. Hence, the default penalty stiffness will tend to decrease as the contact mass decreases.
The SCALE PENALTY parameter on the *CONTACT CONTROLS option can be used to modify the penalty stiffnesses by scaling the default values, which can influence the stable time increment. The stable time increment is affected by penalty contact only while the surfaces are in contact. SCALE PENALTY=10.0 has been specified for contact pairs involving the rigid sphere in the analysis with the lighter sphere, so we can expect that penalty contact will have a greater influence on the time incrementation in that analysis.
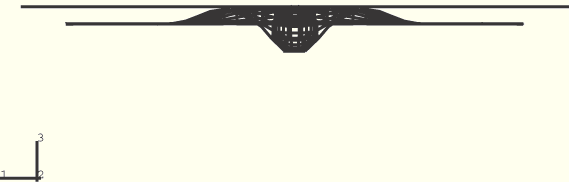
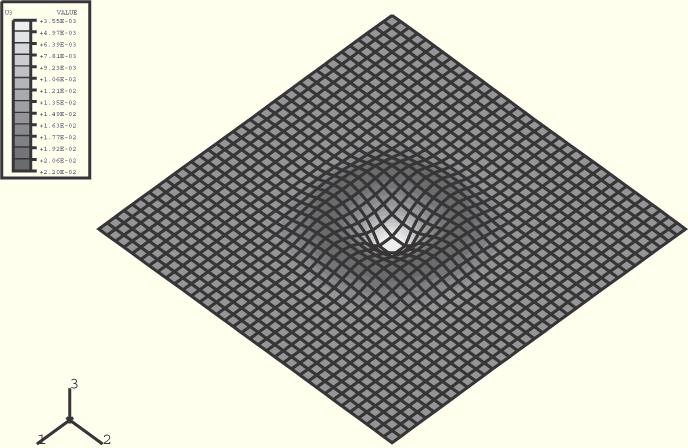
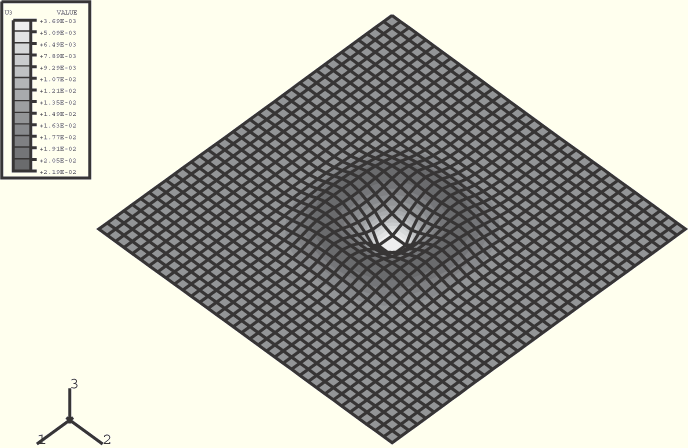
The deformed configuration for the first analysis is shown in Figure 1.6.23–2. Contour plots of the vertical displacement of the shell for the two analyses are shown in Figure 1.6.23–3 and Figure 1.6.23–4. The final shell configuration is nearly the same in the two models. These plots demonstrate that energy stored in penalty contact is recoverable, because shell nodes have rebounded after hitting the rigid plate. By default, viscous contact damping is activated for penalty contact, so a small amount of the energy stored in the penalty contact constraints is dissipated. This type of rebound would not occur if kinematic contact were used, since kinematic contact assumes “perfect plastic” impact.
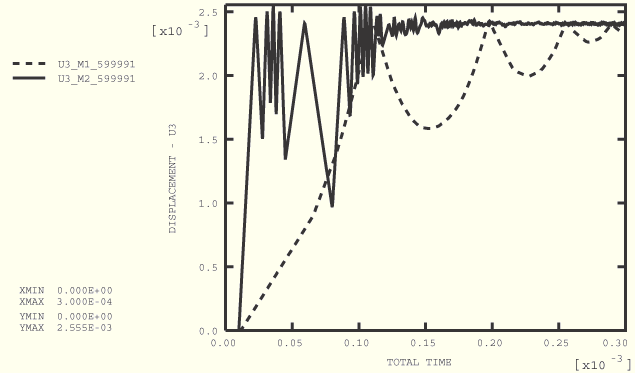
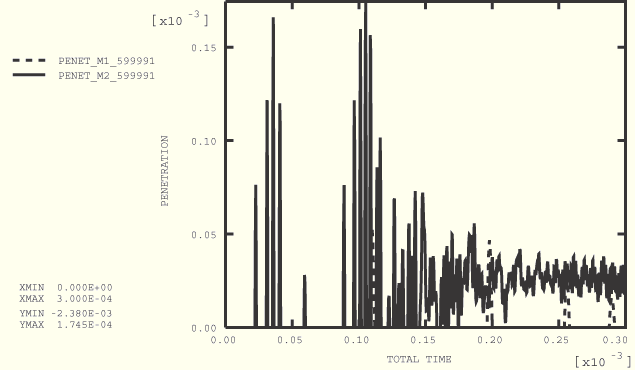
History plots of the displacement of the rigid sphere for the two analyses are shown in Figure 1.6.23–5. The rigid sphere bounces back and forth between the other surfaces. The frequency of this oscillation is much higher for the analysis with the lighter sphere. Displacement of the rigid sphere exceeding 2.38 × 10–3 corresponds to penetration of the element-based rigid sphere into the rigid plate. For a smooth sphere of radius 10–2, a displacement exceeding 2.0 × 10–3 would correspond to penetration. The penetration of the element-based sphere into the plate is plotted in Figure 1.6.23–6. The penetration is on the same order of magnitude for the two analyses. If the default penalty stiffnesses had been used for the analysis with the lighter sphere, the penetrations would have been an order of magnitude larger. In most analyses the contact penetrations will not be significant with the default penalty stiffnesses, but “pinching” of the sphere between the other two surfaces causes the penetration to be moderately significant in this example. Penetrations in a given problem can be reduced by increasing the SCALE PENALTY parameter at a cost of decreasing the stable time increment.
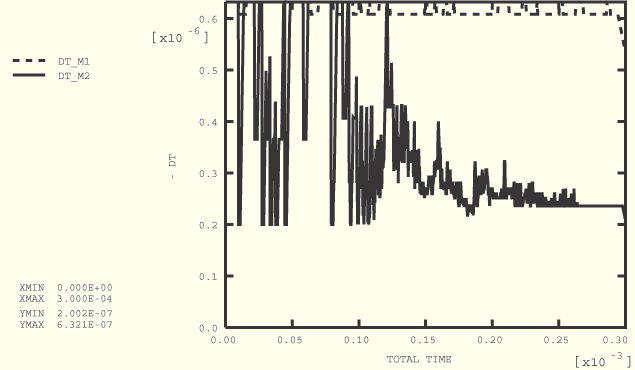
The ELEMENT BY ELEMENT parameter has been specified on the *DYNAMIC option to demonstrate the effect of penalty contact on the stable time increment of the elements. History plots of the time increment for the two analyses are shown in Figure 1.6.23–7. For the analysis that uses the default penalty stiffnesses, the time increment dips by about 4% for increments in which the shell surface contacts either or both rigid surfaces. For the analysis with SCALE PENALTY=10.0 specified, the time increment reductions associated with contact are more significant, as expected. In this case the time increment is cut by nearly a third in many increments in which the surfaces are in contact, and the number of increments for the analysis is nearly twice that of the analysis with the heavier sphere. When the SCALE PENALTY parameter applies to contact pairs involving rigid surfaces, the time increment is reduced by roughly the square root of the SCALE PENALTY value during increments in which contact occurs. The effect of the SCALE PENALTY parameter on the time increment is somewhat less significant for contact between deformable surfaces.
Analysis with the sphere mass equal to 10–2 and the time increment based on the element-by-element estimate.
General contact analysis with the sphere mass equal to 10–2 and the time increment based on the element-by-element estimate.
Analysis with the sphere mass equal to 10–4 and the time increment based on the element-by-element estimate.
General contact analysis with the sphere mass equal to 10–4 and the time increment based on the element-by-element estimate.
Analysis with the sphere mass equal to 10–2 and the time increment based on the global estimate.
General contact analysis with the sphere mass equal to 10–2 and the time increment based on the global estimate.
Analysis with the sphere mass equal to 10–4 and the time increment based on the global estimate.
General contact analysis with the sphere mass equal to 10–4 and the time increment based on the global estimate.
Analysis testing both penalty and kinematic contact pairs.
Analysis testing both general contact and kinematic contact pairs.
External file containing the node data for these analyses.
External file containing the element data for these analyses.