Product: ABAQUS/Standard
Random response linear dynamic analysis is used to predict the response of a structure subjected to a nondeterministic continuous excitation that is expressed in a statistical sense by a cross-spectral density (CSD) matrix. The random response procedure uses the set of eigenmodes extracted in a previous eigenfrequency step to calculate the corresponding power spectral densities (PSD) of response variables (stresses, strains, displacements, etc.) and, hence—if required—the variance and root mean square values of these same variables. This section provides brief definitions and explanations of the terms used in this type of analysis. Detailed discussion of the theory of random response analysis is provided in the books by Clough and Penzien (1975), Hurty and Rubinstein (1964), and Thompson (1988).
Examples of random response analysis are the study of the response of an airplane to turbulence; the response of a car to road surface imperfections; the response of a structure to noise, such as the “jet noise” emitted by a jet engine; and the response of a building to an earthquake.
Since the loading is nondeterministic, it can be characterized only in a statistical sense. We need some assumptions to make this characterization possible. Although the excitation varies in time, in some sense it must be stationary—its statistical properties must not vary with time. Thus, if ![]() is the variable being considered (such as the height of the road surface in the case of a car driving down a rough road), then any statistical function of x,
is the variable being considered (such as the height of the road surface in the case of a car driving down a rough road), then any statistical function of x, ![]() , must have the same value regardless of what time origin we use to compute f:
, must have the same value regardless of what time origin we use to compute f:
![]()
These restrictions ensure that the excitation is, statistically, constant. In the following discussion we also assume that the random variables are real, which is the case for the variables that we need to consider.
We define some measures of a variable that characterize it in a statistical sense.
The mean value of a random variable ![]() is
is
![]()
![]()
The variance of a random variable measures the average square difference between the point value of the variable and its mean:
![]()
![]()
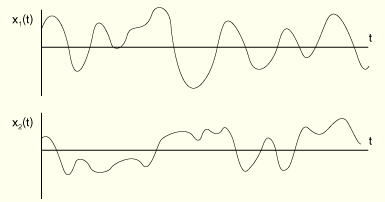
Correlation measures the similarity between two variables. Thus, the cross-correlation between two random functions of time, ![]() and
and ![]() , is the integration of the product of the two variables, with one of them shifted in time by some fixed value
, is the integration of the product of the two variables, with one of them shifted in time by some fixed value ![]() to allow for the possibility that they are similar but shifted in time.
to allow for the possibility that they are similar but shifted in time.
(Such a case would arise, for example, in studying a car driving along a rough road. If the separation of the axles is d and the car is moving at a steady speed v, the back axle sees the same road profile as the front axle, but delayed by a time ![]() . Assume that the road profile moves each wheel which, in turn applies a force to the car frame through the suspension. If
. Assume that the road profile moves each wheel which, in turn applies a force to the car frame through the suspension. If ![]() is the force applied to the rear axle (as a concentrated load in ABAQUS) and
is the force applied to the rear axle (as a concentrated load in ABAQUS) and ![]() is the force applied to the front axle,
is the force applied to the front axle, ![]() .)
.)
The cross-correlation function is, thus, defined as
![]()
Since the mean value of any variable is zero, on average each variable has equal positive and negative content. If the variables are quite similar, their cross-correlation (for some values of ![]() ) will be large; if they are not similar, the product
) will be large; if they are not similar, the product ![]() will sometimes be negative and sometimes positive so that the integral over all time will provide a much smaller value, regardless of the choice of
will sometimes be negative and sometimes positive so that the integral over all time will provide a much smaller value, regardless of the choice of ![]() . A simple result is
. A simple result is
For convenience the cross-correlation can be normalized to define the nondimensional normalized cross-correlation:
![]()
Now consider the cross-correlation of a variable with itself: the autocorrelation. Intuitively we can see that if the variable is “very random,” its autocorrelation will be very small whenever ![]() : there will be no time shift that allows the variable to correlate with itself. However, if the variable is not so random—if it is just a vibration at a fixed frequency—the autocorrelation will be close to
: there will be no time shift that allows the variable to correlate with itself. However, if the variable is not so random—if it is just a vibration at a fixed frequency—the autocorrelation will be close to ![]() whenever
whenever ![]() is chosen to be some integer multiple of half the period of the vibration. Thus, the autocorrelation provides a measure of how random a variable really is.
is chosen to be some integer multiple of half the period of the vibration. Thus, the autocorrelation provides a measure of how random a variable really is.
The autocorrelation of a variable ![]() is, therefore,
is, therefore,
![]()
![]()
Obviously ![]() is symmetric about
is symmetric about ![]() :
:
![]()
![]()
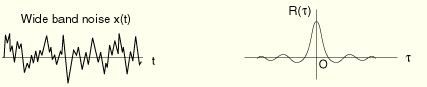
The autocorrelation function of records with very similar amplitude over the wide range of frequencies drops off rapidly as ![]() increases. This kind of function is known as a “wide band” random function.
increases. This kind of function is known as a “wide band” random function.
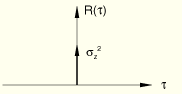
The most extreme wide band random function would have an autocorrelation that is just a delta function:
![]()
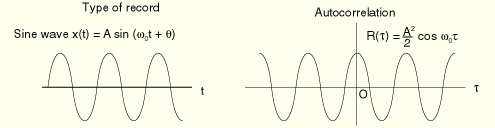
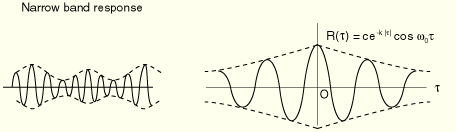
Let us now consider the opposite case, known as a “narrow band” function. The extreme case of such a function is a simple sinusoidal vibration at a single frequency: ![]() . Then
. Then ![]() must also be periodic, since
must also be periodic, since ![]() must attain the same value,
must attain the same value, ![]() , each time the shift,
, each time the shift, ![]() , corresponds to the period of vibration. Performing the integration through time,
, corresponds to the period of vibration. Performing the integration through time,
![]()
![]()

The autocorrelation, ![]() , thus tells us about the nature of the random variable. If
, thus tells us about the nature of the random variable. If ![]() drops off rapidly as the time shift
drops off rapidly as the time shift ![]() moves away from
moves away from ![]() , the variable has a broad frequency content; if it drops off more slowly and exhibits a cosine profile, the variable has a narrow frequency content centered around the frequency corresponding to the periodicity of
, the variable has a broad frequency content; if it drops off more slowly and exhibits a cosine profile, the variable has a narrow frequency content centered around the frequency corresponding to the periodicity of ![]() .
.
We can extend this concept to detect the frequency content of a random variable by cross-correlating the variable with a sine wave: sweeping the wave over a range of frequencies and examining the cross-correlation tells us whether the random variable is dominated by oscillation at particular frequencies. We begin to see that the nature of stationary, ergodic random processes is best understood by examining them in the frequency domain.
As an illustration, consider a variable, ![]() , which contains many discrete frequencies. We can write
, which contains many discrete frequencies. We can write ![]() in terms of a Fourier series expanded in N steps of a fundamental frequency
in terms of a Fourier series expanded in N steps of a fundamental frequency ![]() :
:

![]()
The variance of ![]() is
is

![]()
Thus, thanks to the orthogonality of Fourier terms, the variance (the mean square value) of the series is the sum of the variances (the mean square values) of its components. In particular, we see that ![]() is the variance, or mean square value, of the variable at the frequency
is the variance, or mean square value, of the variable at the frequency ![]() .
.
The contribution to the variance of x, ![]() , at the frequency
, at the frequency ![]() , per unit frequency, is thus
, per unit frequency, is thus
![]()
As we examine x as a function of frequency, ![]() tells us the amount of “power” (in the sense of mean square value) contained in x, per unit frequency, at the frequency
tells us the amount of “power” (in the sense of mean square value) contained in x, per unit frequency, at the frequency ![]() . As we consider smaller and smaller intervals,
. As we consider smaller and smaller intervals, ![]() ,
, ![]() is the power spectral density (PSD) of the variable x:
is the power spectral density (PSD) of the variable x:
![]()
Notice that ![]() has units of (variable)2/frequency, where (variable) is the unit of the variable (displacement, force, stress, etc.). In this case “frequency” is almost always given in Hz, although—since ABAQUS does not have any built-in units—the frequency could be expressed in any other units of cycles per time. However,
has units of (variable)2/frequency, where (variable) is the unit of the variable (displacement, force, stress, etc.). In this case “frequency” is almost always given in Hz, although—since ABAQUS does not have any built-in units—the frequency could be expressed in any other units of cycles per time. However, ![]() should not be given per circular frequency (radians per time): ABAQUS assumes that
should not be given per circular frequency (radians per time): ABAQUS assumes that ![]() , not
, not ![]() .
.
Since the variables of interest in random response analysis are characterized as functions of frequency, the Fourier transform plays a major role in converting from the time domain to the frequency domain and vice versa. The Fourier transform of ![]() , which we write as
, which we write as ![]() , is defined by
, is defined by
![]()
![]()
Simple manipulation provides
![]()
If ![]() is real only (which is the case for the variables we need to consider), this expression shows that we must have
is real only (which is the case for the variables we need to consider), this expression shows that we must have
![]()
![]()
![]()
For completeness we also note the inverse transformation,
![]()
We now need Parseval's theorem:
Applying this theorem to the variance (the mean square value):
![]()
![]()
![]()
![]()
To avoid integration over negative frequencies, we write the variance as
![]()
![]()
Now consider the autocorrelation function:
![]()
![]()
Following a similar argument to that used above to develop the idea of the power spectral density, we can define the cross-spectral density (CSD) function, ![]() , which gives the cross-correlation between two variables,
, which gives the cross-correlation between two variables, ![]() , as
, as
![]()
![]()
Transforming the original definition of ![]() to the frequency domain provides
to the frequency domain provides
By comparison,
![]()
The general concept of random response analysis is now clear. A system is excited by some random loads or prescribed base motions, which are characterized in the frequency domain by a matrix of cross-spectral density functions, ![]() . Here we think of N and M as two of the degrees of freedom of the finite element model that are exposed to the random loads or prescribed base motions.
. Here we think of N and M as two of the degrees of freedom of the finite element model that are exposed to the random loads or prescribed base motions.
In typical applications the range of frequencies will be limited to those to which we know the structure will respond—we do not need to consider frequencies that are higher than the modes in which we expect the structure to respond.
The values of ![]() might be provided by Fourier transformation of the cross-correlation of time records or by the Fourier transformation of the autocorrelation of a single time record, together with known geometric data, as in the case of the car driving along a roughly grooved road, where the autocorrelation of the road surface profile, together with the speed of the car and the axle separation, allow
might be provided by Fourier transformation of the cross-correlation of time records or by the Fourier transformation of the autocorrelation of a single time record, together with known geometric data, as in the case of the car driving along a roughly grooved road, where the autocorrelation of the road surface profile, together with the speed of the car and the axle separation, allow ![]() to be defined for the front (1) and rear (2) axles, as shown above. (If, in this case, the road profile seen by the wheels on the left side of the car is not similar to that seen by the wheels on the right side of the car, the cross-correlation of the left and right road surface profiles will also be required to define the excitation.)
to be defined for the front (1) and rear (2) axles, as shown above. (If, in this case, the road profile seen by the wheels on the left side of the car is not similar to that seen by the wheels on the right side of the car, the cross-correlation of the left and right road surface profiles will also be required to define the excitation.)
The system will respond to this excitation. We are usually interested in looking at the power spectral densities of the usual response variables—stress, displacement, etc. The PSD history of any particular variable will tell us the frequencies at which the system is most excited by the random loading.
We might also compute the cross-spectral densities between variables. These are usually not of interest, and ABAQUS/Standard does not provide them. (They might be needed if the analysis involves obtaining results that, in turn, will define the loading for some other system. For example, the response of a building to seismic loading might be used to obtain the motions of the attachment points for a piping system in the building so that the piping system can then be analyzed. The only option would be to model the entire system together.)
An overall picture is provided by looking at the variance (the mean square value) of any variable; the RMS value is provided for this purpose. The RMS value is used instead of variance because it has the same units as the variable itself. ABAQUS/Standard computes it by integrating the single-sided power spectral density of the variable over the frequency range, since

This integration is performed numerically by using the trapezoidal rule over the range of frequencies specified for the random response step:

The user must ensure that enough frequency points are specified so that this approximate integration will be sufficiently accurate.
The transformation of the problem into the frequency domain inherently assumes that the system under study is responding linearly: the random response procedure is considered as a linear perturbation analysis step.
What remains, then, is for us to consider how ABAQUS/Standard finds the linear response to the random excitation.
Random response is studied in the frequency domain. Therefore, we need the transformation from load to response as a function of frequency. Since the random response is treated as the integration of a series of sinusoidal vibrations, this transformation is based on the same steady-state response function used for a steady-state dynamic analysis and described in “Steady-state linear dynamic analysis,” Section 2.5.7.
The discrete (finite element) linear dynamic system has the equilibrium equation
![]()
We project the problem onto the eigenmodes of the system. To do this the modes are first extracted from the undamped system:
![]()
Typically the structural dynamic response is well represented by a small number of the lower modes of the model, so the number of modes is usually ![]() –
–![]() , while the number of physical degrees of freedom might be
, while the number of physical degrees of freedom might be ![]() –
–![]() .
.
The eigenmodes are orthogonal across the mass and stiffness matrices:
We assume that any damping is in the general form of “Rayleigh damping”:
![]()
The problem, thus, projects into a set of uncoupled modal response equations,
![]()
![]()
Steady-state excitation is of the form
![]()
![]()
Random loading is defined by the cross-spectral density matrix ![]() , which links all loaded degrees of freedom (N and M). Projecting this matrix onto the modes provides the cross-spectral density function for the generalized (modal) loads:
, which links all loaded degrees of freedom (N and M). Projecting this matrix onto the modes provides the cross-spectral density function for the generalized (modal) loads:
![]()
The complex frequency response function then defines the response of the generalized coordinates as
![]()
Finally, the response of the physical variables is recovered from the modal responses as
![]()
![]()
The PSDs for the velocity and acceleration of the same variable are
![]()
![]()
Recall that we may typically have ![]() –
–![]() eigenmodes but many more (
eigenmodes but many more (![]() –
–![]() ) physical degrees of freedom. Therefore, if many of the physical degrees of freedom are loaded (as in the case of a shell structure exposed to random acoustic noise), it may be computationally expensive to perform operations such as
) physical degrees of freedom. Therefore, if many of the physical degrees of freedom are loaded (as in the case of a shell structure exposed to random acoustic noise), it may be computationally expensive to perform operations such as
![]()
In contrast, operations such as
![]()
Forming
![]()
With this approach the cross-spectral density function for the generalized loads, ![]() , can be constructed as
, can be constructed as
Although this procedure is not natural for typical correlated loadings (like road excitation or jet noise), loadings can always be defined this way by using enough cross-correlation definitions. The approach then reduces the computational cost for models with many loaded physical degrees of freedom. The approach works well for uncorrelated and fully correlated loadings, which are quite common cases.
ABAQUS/Standard allows the user to provide an input PSD (say ![]() ) in decibel units rather than units of power/frequency. There are various ways to convert from decibel units to units of power/frequency, depending on how the frequencies in one octave band are related to the frequencies in the next. A general formula relates the center (midband) frequencies
) in decibel units rather than units of power/frequency. There are various ways to convert from decibel units to units of power/frequency, depending on how the frequencies in one octave band are related to the frequencies in the next. A general formula relates the center (midband) frequencies ![]() between octaves as
between octaves as
![]()
Since decibel units are based upon log scales, the center frequency for an octave band bounded by lower frequency ![]() and upper frequency
and upper frequency ![]() is given by
is given by
![]()
![]()
![]()
![]()
To convert from one type of conversion formula to the next, we need the following general decibel to power/frequency conversion equation:
![]()
![]()
The PSD data can be given with respect to some other type of octave band frequency scale. In that case we can convert the PSD data at those frequencies coinciding with the full octave band scale by computing an equivalent full octave band reference power based on the following ratio:
![]()
![]()