Product: ABAQUS/Explicit
This example illustrates the use of adaptive meshing in simulations of extrusion processes with three axisymmetric analysis cases. First, a transient simulation is performed for a backward, flat-nosed die, extrusion geometry using adaptivity on a Lagrangian mesh domain. Second, a transient simulation is performed on the analogous forward, square die, extrusion geometry, also using adaptivity on a Lagrangian mesh domain. Finally, a steady-state simulation is performed for the forward extrusion geometry using adaptivity on an Eulerian mesh domain.
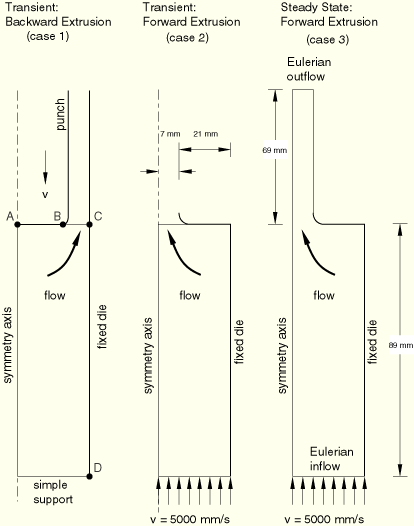
The model configurations for the three analysis cases are shown in Figure 1.3.14–1. Each of the models is axisymmetric and consists of one or more rigid tools and a deformable blank. The rigid tools are modeled as TYPE=SEGMENTS analytical rigid surfaces. All contact surfaces are assumed to be well-lubricated and, thus, are treated as frictionless. The blank is made of aluminum and is modeled as a von Mises elastic-plastic material with isotropic hardening. The Young's modulus is 38 GPa, and the initial yield stress is 27 MPa. The Poisson's ratio is 0.33; the density is 2672 kg/m3.
The model geometry consists of a rigid die, a rigid punch, and a blank. The blank is meshed with CAX4R elements and measures 28 × 89 mm. The blank is constrained along its base in the z-direction and at the axis of symmetry in the r-direction. Radial expansion is prevented by contact between the blank and the die. The punch and the die are fully constrained, with the exception of the prescribed vertical motion of the punch. The punch is moved downward 82 mm to form a tube with wall and endcap thicknesses of 7 mm each. The punch velocity is specified using the SMOOTH STEP parameter on the *AMPLITUDE option so that the response is essentially quasi-static.
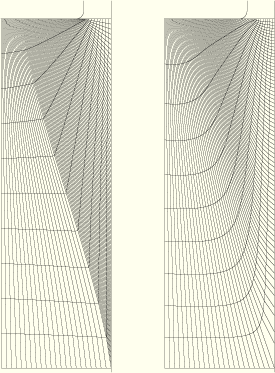
The deformation that occurs in extrusion problems, especially in those that involve flat-nosed die geometries, is extreme and requires adaptive meshing. Since adaptive meshing in ABAQUS/Explicit works with the same mesh topology throughout the step, the initial mesh must be chosen such that the mesh topology will be suitable for the duration of the simulation. A simple meshing technique has been developed for extrusion problems such as this. In two dimensions it uses a four-sided, mapped mesh domain that can be created with nearly all finite element mesh preprocessors. The vertices for the four-sided, mapped mesh are shown in Figure 1.3.14–1 and are denoted A, B, C, and D. Two vertices are located on either side of the extrusion opening, the third is in the corner of the dead material zone (the upper left corner of the blank), and the fourth vertex is located in the diagonally opposite corner. A 10 × 60 element mesh using this meshing technique is created for this analysis case and is shown in Figure 1.3.14–2. The mesh refinement is oriented such that the fine mesh along sides AB and DC will move up along the extruded walls as the punch is moved downward.
An adaptive mesh domain is defined that incorporates the entire blank. Because of the extremely large distortions expected in the backward extrusion simulation, three mesh sweeps, instead of the default value of one, are specified using the MESH SWEEPS parameter on the *ADAPTIVE MESH option. The default adaptive meshing frequency of 10 is used. Alternatively, a higher frequency could be specified to perform one mesh sweep per adaptive mesh increment. However, this method would result in a higher computational cost because of the increased number of advection sweeps it would require.
A substantial amount of initial mesh smoothing is performed by increasing the value of the INITIAL MESH SWEEPS parameter on the *ADAPTIVE MESH option to 100. The initially smoothed mesh is shown in Figure 1.3.14–2. Initial smoothing reduces the distortion of the mapped mesh by rounding out corners and easing sharp transitions before the analysis is performed; therefore, it allows the best mesh to be used throughout the analysis.
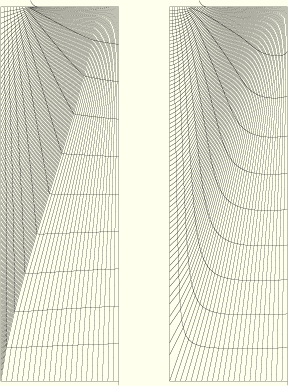
The model geometry consists of a rigid die and a blank. The blank geometry and the mesh are identical to those described for Case 1, except that the mapped mesh is reversed with respect to the vertical plane so that the mesh lines are oriented toward the forward extrusion opening. The blank is constrained at the axis of symmetry in the r-direction. Radial expansion is prevented by contact between the blank and the die. The die is fully constrained. The blank is pushed up 19 mm by prescribing a constant velocity of 5 m/sec for the nodes along the bottom of the blank. As the blank is pushed up, material flows through the die opening to form a solid rod with a 7 mm radius.
Adaptive meshing for Case 2 is defined in a similar manner as for Case 1. The undeformed mesh configurations, before and after initial mesh smoothing, are shown in Figure 1.3.14–3.
The model geometry consists of a rigid die, identical to the die used for Case 2, and a blank. The blank geometry is defined such that it closely approximates the shape corresponding to the steady-state solution: this geometry can be thought of as an “initial guess” to the solution. As shown in Figure 1.3.14–4, the blank is discretized with a simple graded pattern that is most refined near the die fillet. No special mesh is required for the steady-state case since minimal mesh motion is expected during the simulation. The blank is constrained at the axis of symmetry in the r-direction. Radial expansion of the blank is prevented by contact between it and the die.
An adaptive mesh domain is defined that incorporates the entire blank. Because the Eulerian domain undergoes very little overall deformation and the material flow speed is much less than the material wave speed, the frequency of adaptive meshing is changed to 5 from the default value of 1 to improve the computational efficiency of the analysis.
The outflow boundary is assumed to be traction-free and is located far enough downstream to ensure that a steady-state solution can be obtained. This boundary is defined using the *SURFACE, REGION TYPE=EULERIAN option. A multi-point constraint is defined on the outflow boundary to keep the velocity normal to the boundary uniform. The inflow boundary is defined using the *BOUNDARY, REGION TYPE=EULERIAN option to prescribe a velocity of 5 m/sec in the vertical direction. Adaptive mesh constraints are defined on both the inflow and outflow boundaries to fix the mesh in the vertical direction using the *ADAPTIVE MESH CONSTRAINT option. This effectively creates a stationary control volume with respect to the inflow and outflow boundaries through which material can pass.
The results for each analysis case are described below.
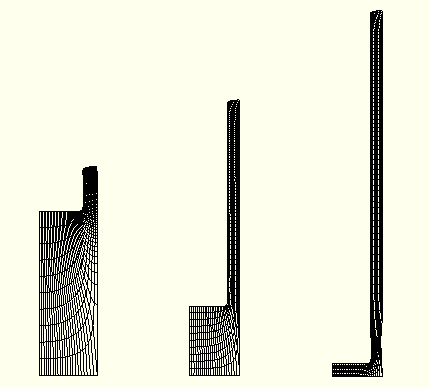
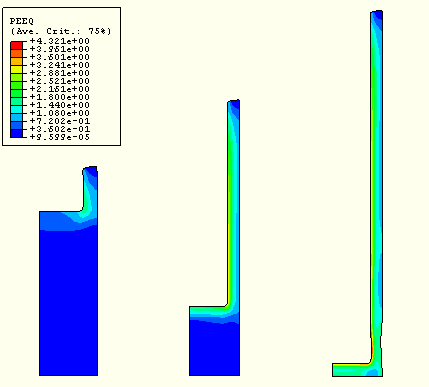
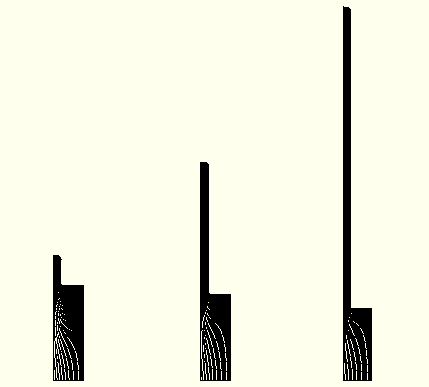
The use of the mapped meshing technique along with adaptive meshing allows the backward extrusion analysis to run to completion, creating the long tube with an endcap. Three plots of the deformed mesh at various times are shown in Figure 1.3.14–5. These plots clearly show how the quality of the mesh is preserved for the majority of the simulation. Despite the large amount of deformation involved, the mesh remains smooth and concentrated in the areas of high strain gradients. Extreme deformation and thinning at the punch fillet occurs near the end of the analysis. This thinning can be reduced by increasing the fillet radius of the punch. Corresponding contours of equivalent plastic strain are plotted in Figure 1.3.14–6. The plastic strains are highest along the inner surface of the tube.
Adaptive meshing enables the transient forward extrusion simulation to proceed much further than would be possible using a pure Lagrangian approach. After pushing the billet 19 mm through the die, the analysis cannot be continued because the elements become too distorted. Since the billet material is essentially incompressible and the cross-sectional area of the die opening at the top is 1/16 of the original cross-sectional area of the billet, a rod measuring approximately 304 mm (three times the length of the original billet) is formed.
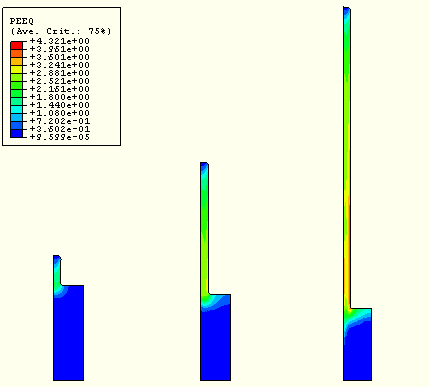
Three plots of the deformed mesh at various times in the transient forward extrusion are shown in Figure 1.3.14–7. As in the backward extrusion case, the plots show that the quality of the mesh is preserved for a majority of the simulation. The last deformed shape has been truncated for clarity because the extruded column becomes very long and thin. Contours of equivalent plastic strain at similar times are shown in Figure 1.3.14–8. The plastic strain distribution developing in the vertical column does not reach a steady-state value, even at a height of 304 mm. The steady-state results reported in the discussion for Case 3 show that a steady-state solution based on the equivalent plastic strain distribution is not reached until much later. An absolute steady-state solution cannot be reached until the material on the upstream side of the dead material zone first passes along that zone and through the die opening. The dead material zone is roughly the shape of a triangle and is located in the upper right-hand corner of the die.
The steady-state solution to the forward extrusion analysis is obtained at an extruded column height of 800 mm, which corresponds to pushing the billet 50 mm through the die. Thus, this analysis runs 2.5 times longer than Case 2.
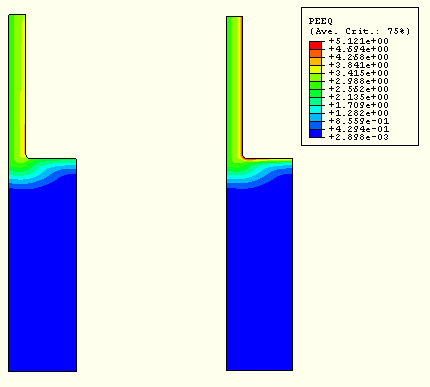
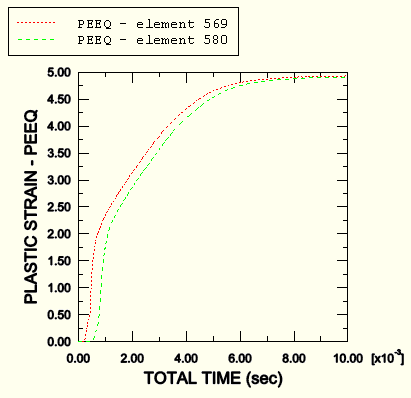
Contours of equivalent plastic strain in the middle and at the end of the simulation are shown in Figure 1.3.14–9. Time histories of the equivalent plastic strains on the outer edge of the extruded column at the outflow boundary and 27.5 mm below the outflow boundary are shown in Figure 1.3.14–10. The plastic strains at both locations converge to the same value by the end of the simulation, which indicates that the solution has reached a steady state. The final mesh configuration is shown in Figure 1.3.14–11. The mesh undergoes very little change from the beginning to the end of the analysis because of the accurate initial guess made for the steady-state domain shape and the ability of the adaptive meshing capability in ABAQUS/Explicit to retain the original mesh gradation.
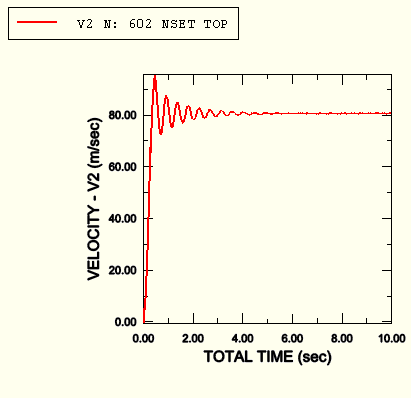
As a further check on the accuracy of the steady-state simulation and the conservation properties of adaptive meshing, a time history of the velocity at the outflow boundary is shown in Figure 1.3.14–12. The velocity reaches a steady value of approximately 80 m/s, which is consistent with the incompressible material assumption and the 1/16 ratio of the die opening to the billet size.
Case 1.
Node data for Case 1.
Element data for Case 1.
Case 2.
Node data for Case 2.
Element data for Case 2.
Case 3.
Node data for Case 3.
Element data for Case 3.