Product: ABAQUS/Standard
The objectives of this example are to illustrate and verify the nonlinear spring option and the direct, implicit, dynamic integration option in a simple example for which an independent solution is available (Underwood and Park, 1981).
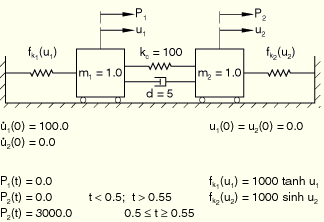
The system consists of two nonlinear springs, each connecting a mass to a fixed point, with a linear spring and a dashpot between the masses. The system is shown in Figure 2.6.1–1. The spring characteristics, the initial conditions, and the forcing functions are also shown in the figure. All values are assumed to be in consistent units.
For direct comparison with the solution of Underwood and Park (1981), the analysis is run with fixed time increments. In Underwood and Park (1981) a time increment of 0.0005 is shown to be very accurate with the central difference (explicit) integration operator, while a time increment of 0.03 is less accurate. In this study the time increment chosen is 0.01. This gives results that agree closely with those reported by Underwood and Park (1981).
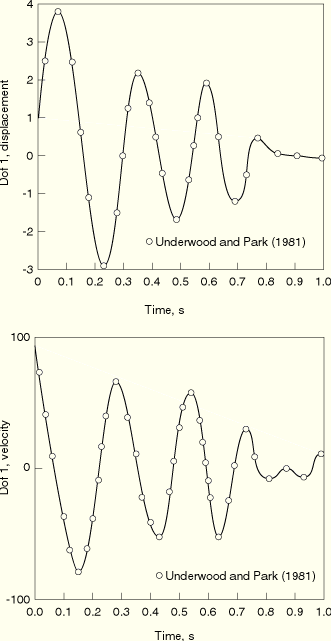
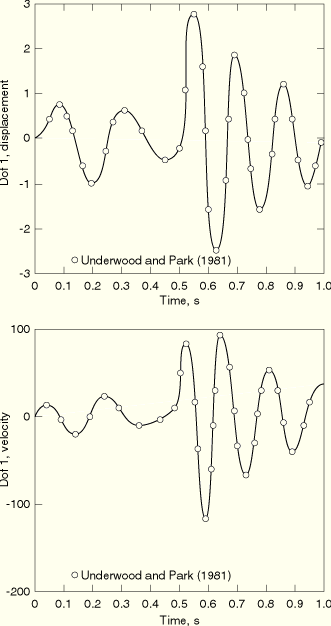
The displacement and velocity histories of the two masses are shown in Figure 2.6.1–2 and Figure 2.6.1–3. The results obtained by Underwood and Park (1981) are shown in the same figures. The agreement is quite close.
Dynamic analysis.
Identical to the input data shown in 2dofdynamics.inp, except that temperature- and field-variable-dependent spring and dashpot properties are used.