Product: ABAQUS/Explicit
In this example we analyze the elastic response of an infinite cylinder excited by a planar shock wave with a step function profile (plane wave). The response calculated by the USA-STAGS program (DeRuntz and Brogan, 1980) can be found in the paper by DeRuntz (1989). Geers (1972) has presented an analytical solution for the infinite cylinder. The problem is analyzed using both the scattered and total wave formulations, and the response calculated by ABAQUS/Explicit is compared to the results given by DeRuntz (1989).
In the second part of this problem we analyze the elastic response of an infinite cylinder in a fluid with a bottom surface. The cylinder is excited by a single spherical shock wave and pressure wave reflections off the bottom surface. The response calculated by ABAQUS/Explicit for this analysis is compared to that of a multiple shock wave analysis.
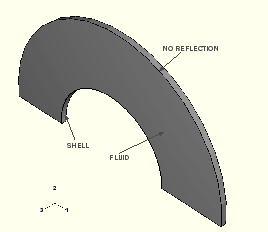
The infinite cylinder excited by a plane wave is a two-dimensional problem with a single plane of symmetry. The half-model for this problem is shown in Figure 1.13.3–1. Plane strain boundary conditions are imposed along the axis of the cylinder, and symmetry boundary conditions are imposed on the x–z plane. The boundary conditions are imposed on the structural model using the *BOUNDARY option. A consistent set of boundary conditions need not be given for the fluid since they are applied by default. The structure is enclosed in a fluid mesh that models the surrounding fluid. Two different meshes are chosen, and the results are compared. The infinite cylinder is assumed to be fully submerged in the fluid so that free surface effects are negligible. The cylindrical shell is assumed to be made of steel, and the fluid is assumed to be water; however, the material properties have been nondimensionalized. The coupling between the structure and the fluid is enforced using the *TIE option, which does not require compatible meshes. The mesh density for the fluid is chosen such that the shock is captured accurately. The condition for non-reflection is applied on the outer surface of the fluid mesh via the predefined radiation boundary condition, *IMPEDANCE PROPERTY, with the TYPE parameter set to CIRCULAR and the radius of the outer circle specified on the data line.
An explosion occurs on the x-axis far from the structure. The loading is applied at the interface of the structure and the fluid using the *INCIDENT WAVE option as part of the history data, with the associated *INCIDENT WAVE PROPERTY option specifying the location of the charge and the standoff point. Since the front is planar, the charge location is used only to compute the direction of the incoming shock. The standoff point is chosen as the point on the structure closest to the charge, so that the simulation begins when the front is just about to impinge on the structure. The pressure profile of the shock wave measured at the charge standoff point is given in an *AMPLITUDE definition. For this problem the pressure profile is a step function with a magnitude of 1.0 × 10–4.
The half-cylinder is modeled with 4-node quadrilateral shell elements. In both models the structure is meshed with 36 S4R elements. The fluid meshes are different in the models displaying variations of mesh density. Fluid meshes are modeled with AC3D8R elements. The analyses are run with double precision in ABAQUS/Explicit, using direct user control for the time interval. The bulk viscosities and the interval sizes have been specified to optimize the efficiency of the solution, by reducing the run time and capturing the shock accurately.
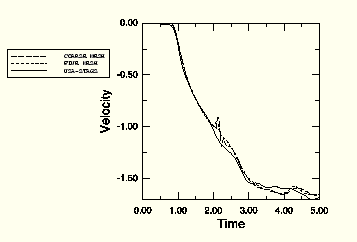
The coarse models use an average mesh size of 0.035 units in the radial direction with each element spanning 10°. In the fine models the average mesh size in the radial direction is 0.02 units, and each element spans 5°. The radiating surface is 2 units away from the center of the shell structure. The results are presented as the value of the radial velocity of the leading node (nearest to the charge, see Figure 1.13.3–2) and the trailing node (farthest from the charge, see Figure 1.13.3–3). The ABAQUS results are compared with those obtained using the USA-STAGS program. There is good comparison between the codes.
Coarse mesh model, scattered wave formulation.
Fine mesh model, scattered wave formulation.
Coarse mesh model, total wave formulation.
Fine mesh model, total wave formulation.
DeRuntz, J. A., Jr., Private Communication, 1990.
DeRuntz, J. A., Jr., “The Underwater Shock Analysis Code and its Applications,” 60th Shock and Vibration Symposium Proceedings, vol. 1, pp. 89–107, 1989.
DeRuntz, J. A., Jr., and F. A. Brogan, “Underwater Shock Analysis of Nonlinear Structures, A Reference Manual for the USA-STAGS Code (Version 3),” DNA 5545F, Defense Nuclear Agency, Washington D.C., 1980.
Geers, T. L., “Scattering of a Transient Acoustic Wave by an Elastic Cylindrical Shell,” Journal of the Acoustical Society of America, vol. 51, no.5 (part 2), pp. 1640–1651, 1972.
The infinite cylinder is excited by a shock wave from a charge that is relatively close to the structure. The effect of the pressure wave reflecting off the bottom surface is included. Bottom surface effects are treated in ABAQUS using imaging techniques where the incident pressure wave is made up of both primary and image contributions with the appropriate time delays automatically calculated. The analysis is performed in ABAQUS/Explicit using both the total and scattered wave formulations.
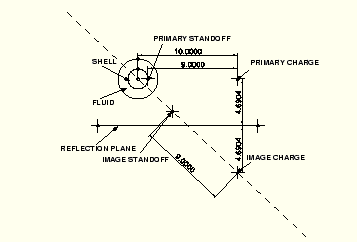
The cylinder geometry and fluid properties are the same as those defined in the first part of this example. While the structure is symmetric, the loading is not. Therefore, symmetry is not used in the analysis. A cross-section of the full cylinder model is shown in Figure 1.13.3–4. A single charge is located on the x-axis 10 length units away from the cylinder (z) axis. The bottom surface is located 4.6904 length units below the cylinder axis. It is assumed that 80% of the incoming wave is reflected off the “soft” bottom surface. The charge location is included as data with the *INCIDENT WAVE PROPERTY option. The bottom surface location is specified using the *INCIDENT WAVE REFLECTION option. The reflective properties of the surface are converted into equivalent impedance properties and specified using the *IMPEDANCE PROPERTY option. The model consists of 72 4-node quadrilateral shell elements and 2880 AC3D8R fluid elements. The standoff point is placed along the x-axis, at the point where the structure and fluid come into contact.
A two-charge model, wherein the bottom surface is represented by a second “image” charge in addition to the original primary charge, is also considered. The image charge is located at the same x-direction coordinate used for the primary charge but below it by twice the distance to the bottom surface. The bottom surface definition is intentionally excluded from this model. Multiple charges are represented by the repeated use of the *INCIDENT WAVE option within an analysis step. To specify the time delay due to reflection correctly, the distance between the image charge and its standoff point is set equal to the distance between the primary charge and its standoff point. In addition, the standoff point is located on the line joining the image charge to the center of the circle. To simulate the partial reflection requirement, the image charge magnitude is scaled by the reflection coefficient of 0.8.
The bottom surface analyses, uc_xpl_1ch.inp and uc_xpl_tot_1ch.inp, use constant time increments and are conducted in a single step. The results are presented as the values of the radial and tangential velocities of the leading node (nearest to the primary charge) in Figure 1.13.3–5. The effects of the pressure wave reflecting off the bottom surface are delayed due to the longer effective standoff distance. The results of the multiple charge analyses, uc_xpl_2ch.inp and uc_xpl_tot_2ch.inp, are shown to agree exactly with the bottom surface analysis.
Full-cylinder model with a single charge and a bottom surface.
Full-cylinder model with two charges and no bottom surface.
Full-cylinder model with a single charge, total wave formulation.
Full-cylinder model with two charges, total wave formulation.