Product: ABAQUS/Standard
The purpose of this example is to verify the linear dynamic procedures in ABAQUS by comparing the solutions with exact solutions for a simple system with three degrees of freedom. ABAQUS offers four dynamic analysis procedures for linear problems based on extraction of the eigenmodes of the system: *MODAL DYNAMIC analysis, which provides time history response; *RESPONSE SPECTRUM analysis, in which peak response values are computed for a given response spectrum; *STEADY STATE DYNAMICS analysis, which gives the response amplitude and phase when the system is excited continuously with a sinusoidal loading; and *RANDOM RESPONSE analysis, which provides statistical measures of a structure's response to nondeterministic loading. These linear dynamic analysis options are discussed in “Modal dynamics,” Section 2.5 of the ABAQUS Theory Manual.
The model consists of three truss elements of type T3D2 located along the x-axis, with the y- and z-displacement components restrained, so the problem is one-dimensional. The x-displacement at node 1 is also restrained, leaving three active degrees of freedom. The structure has a total length of 30, cross-sectional area of 2, density of 1/90, and Young's modulus of 5. (All values are given in consistent units.)
The first step for all of the linear dynamics procedures is to calculate the eigenvalues and eigenvectors of the system. The mass matrix of element type T3D2 is lumped; therefore, the mass matrix of this three truss system is
The three eigenvalues and the corresponding eigenvectors using the default normalization method are given in the following table:
| Mode | Eigenvalue | Frequency | Eigenvector magnitude at node | |||
|---|---|---|---|---|---|---|
| (Hz) | 1 | 2 | 3 | 4 | ||
| 1 | 1.2058 | 0.1748 | 0 | 0.5 | 0.866 | 1.0 |
| 2 | 9.0 | 0.4775 | 0 | 1.0 | 0 | –1.0 |
| 3 | 16.794 | 0.6522 | 0 | 0.5 | –0.866 | 1.0 |
ABAQUS also calculates the modal participation factors, ![]() , the generalized mass,
, the generalized mass, ![]() , and the effective mass for each eigenvector (see “Variables associated with the natural modes of a model,” Section 2.5.2 of the ABAQUS Theory Manual, for definitions). The values in this case are:
, and the effective mass for each eigenvector (see “Variables associated with the natural modes of a model,” Section 2.5.2 of the ABAQUS Theory Manual, for definitions). The values in this case are:
| Mode | Participation | Generalized | Effective |
|---|---|---|---|
| factor | mass | mass | |
| 1 | 1.244 | 0.333 | 0.5158 |
| 2 | 0.333 | 0.333 | 0.0370 |
| 3 | 0.0893 | 0.333 | 0.00266 |
ABAQUS allows the eigenvectors to be normalized in one of two ways: such that the largest displacement entry in each eigenvector is unity (NORMALIZATION=DISPLACEMENT, which is the default) or such that the generalized mass for each eigenvector is unity (NORMALIZATION=MASS). Normalization of eigenvectors is discussed in “Natural frequency extraction,” Section 6.3.5 of the ABAQUS Analysis User's Manual. In general, if the default normalization is requested (NORMALIZATION=DISPLACEMENT), the signs of the eigenvectors obtained using different eigenvalue extraction methods or different platforms are consistent because the largest displacement entry in each eigenvector is scaled to positive unity. For this type of normalization the signs of the eigenvector entries may differ for different methods and different platforms only in the case that the maximum and minimum displacement entries in an eigenvector are of equal magnitude but opposite sign. On the other hand, if NORMALIZATION=MASS is requested, the signs of the eigenvectors obtained using different methods or different platforms may vary because, in this case, the eigenvectors are scaled by positive values. The values and signs of the modal participation factors depend on the normalization type and signs of corresponding eigenvectors.
Generalized coordinates for modal dynamic, response spectrum, steady-state, and random response analyses are different depending on the eigenvector normalization. Consequently, for NORMALIZATION=MASS the signs of generalized coordinates will change depending on the signs of the eigenvectors. However, the physical values calculated using the summation of the modal values are independent of the eigenvector normalization.
For this example, the corresponding values using NORMALIZATION=MASS are given in the following tables:
This analysis is performed for three types of systems, described below.
The time history response is obtained for the system when a load of 10 is applied suddenly and held fixed at node 4. Damping of 10% of critical damping in each mode is used. With this excitation the solution for ![]() , the amplitude of the ith eigenmode, is
, the amplitude of the ith eigenmode, is
![]()
Next, the structure is excited by a constant acceleration of 1.0 at the fixed node (node 1), which is defined using the *BASE MOTION option. It can be shown that the equations given above for force excitation can be used for this case when we define the force as
![]()
The *MODAL DYNAMIC step is a linear perturbation procedure and will start from the undeformed configuration by default. However, it is also possible to start the analysis from a deformed configuration by using a *STATIC, PERTURBATION step to create the deformed configuration. This step is followed by *MODAL DYNAMIC, CONTINUE=YES to specify that the starting position is the linear perturbation solution from the previous step (“General and linear perturbation procedures,” Section 6.1.2 of the ABAQUS Analysis User's Manual). This solution is projected onto the eigenvalues to give the initial modal amplitude:
![]()
In this analysis an initial displacement of 1.0 is given to node 4 using a *BOUNDARY condition at this node in a *STATIC, PERTURBATION step. The *FREQUENCY step is then done with the restraint at node 4 removed so that this node is free to vibrate in the subsequent *MODAL DYNAMIC step. (It is essential that the boundary condition be removed before the eigenvalue problem is solved for the natural modes of the system. Otherwise, incorrect modes—with the boundary condition still in place—will be obtained.) Only one mode is used, so some part of the static response is lost in the projection onto this mode.
At the beginning of the *MODAL DYNAMIC, CONTINUE=YES step ABAQUS calculates the initial values of the modal amplitude, using the equation given above, as ![]() 0.8293 for NORMALIZATION=DISPLACEMENT and
0.8293 for NORMALIZATION=DISPLACEMENT and ![]() 0.4779 for NORMALIZATION=MASS. With no damping the response will, therefore, be
0.4779 for NORMALIZATION=MASS. With no damping the response will, therefore, be
![]()
![]()
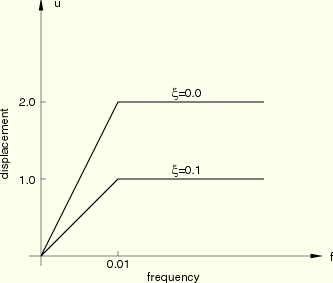
The displacement response spectra shown in Figure 1.4.9–1 are used in the next analysis. Spectra are defined in the figure for no damping and for 10% of critical damping in each mode. In this example 2% of critical damping is used so that the logarithmic interpolation gives a magnitude of 1.7411 for the maximum displacement for each mode. The analysis is done for two cases: absolute summation of the contributions from each mode and SSRS summation. Since frequencies are well separated in this case, the use of the TENP summation method will give results that are identical to the SRSS method, the CQC response will differ only by a small amount from SRSS (because of very small cross-correlation factors between the modes), and the NRL summation method will calculate results that are very close to the ABS summation. For a comparison of all five summation rules, see “Response spectra of a three-dimensional frame building,” Section 2.2.3 of the ABAQUS Example Problems Manual. Absolute summation means that the peak displacement response is estimated as
The steady-state analysis procedure is verified by exciting the model over a range of frequencies. A load of the form
![]()
Two kinds of damping are available for this type of analysis. One is modal damping, which defines the damping term for a mode as
![]()
![]()
ABAQUS provides output as the response amplitude, ![]() , and phase angle,
, and phase angle, ![]() , for the ith mode. For this example, with only the real loads applied, the exact solution—with both modal and structural damping present—is
, for the ith mode. For this example, with only the real loads applied, the exact solution—with both modal and structural damping present—is
![]()
![]()
The input file rodlindynamic_ssdynamics.inp requests a *STEADY STATE DYNAMICS analysis for the forcing frequency range from 0.01 to 10 cycles/time. All three mode shapes are extracted with a *FREQUENCY step and are used throughout the steady-state analysis, as indicated on the *MODAL DAMPING option, where the damping value is defined to be 10% of critical damping in each mode.
The same rod model with structural damping present is now exposed to nondeterministic loading. The case we consider is uncorrelated white noise applied to all nodes. The exact solution for the cross-spectral density matrix of the modal amplitudes (the generalized coordinates) as a function of frequency, ![]() , for continuously distributed white noise is
, for continuously distributed white noise is
![]()
![]()
![]()
![]() is defined by applying nodal loads,
is defined by applying nodal loads, ![]() (where N refers to a degree of freedom in the model and I refers to the load case number) and giving a matrix of scaling factors,
(where N refers to a degree of freedom in the model and I refers to the load case number) and giving a matrix of scaling factors, ![]() , and corresponding frequency functions,
, and corresponding frequency functions, ![]() , for each load case. Here J refers to the matrix of scaling factors
, for each load case. Here J refers to the matrix of scaling factors ![]() by which to scale
by which to scale ![]() in load case I.
in load case I. ![]() is then defined as
is then defined as
In this case we need only one load case, ![]() 1, and one frequency function and associated matrix of scaling factors,
1, and one frequency function and associated matrix of scaling factors, ![]() 1. (See “Random response to jet noise excitation,” Section 1.4.10, for a problem in which several frequency functions and scaling factor matrices are needed to define the cross-spectral density matrix of the loading.) Since white noise is assumed to be uncorrelated,
1. (See “Random response to jet noise excitation,” Section 1.4.10, for a problem in which several frequency functions and scaling factor matrices are needed to define the cross-spectral density matrix of the loading.) Since white noise is assumed to be uncorrelated, ![]() is defined as a diagonal matrix:
is defined as a diagonal matrix: ![]() 0 for
0 for ![]() (Uncorrelated loadings are specified by setting TYPE=UNCORRELATED on the *CORRELATION option, where
(Uncorrelated loadings are specified by setting TYPE=UNCORRELATED on the *CORRELATION option, where ![]() is defined.) We choose a unit magnitude for the scaling factors so that
is defined.) We choose a unit magnitude for the scaling factors so that ![]() becomes a unit matrix. Since the diagonal terms of the cross-spectral density matrix are the power spectral density functions of the loading, the cross-spectral density matrix will be a real diagonal matrix. Therefore, imaginary frequency functions and scaling factors need not be considered here. As a result, the *PSD-DEFINITION option defines a reference power spectral density function (rather than a general frequency function),
becomes a unit matrix. Since the diagonal terms of the cross-spectral density matrix are the power spectral density functions of the loading, the cross-spectral density matrix will be a real diagonal matrix. Therefore, imaginary frequency functions and scaling factors need not be considered here. As a result, the *PSD-DEFINITION option defines a reference power spectral density function (rather than a general frequency function), ![]() , which is scaled by the product of load magnitudes,
, which is scaled by the product of load magnitudes, ![]() (and by
(and by ![]() , but
, but ![]() is a unit matrix). We apply loads
is a unit matrix). We apply loads ![]() of 10 to each of nodes 2 and 3 and a load of 5 to node 4, corresponding to a unit load distributed continuously along the rod.
of 10 to each of nodes 2 and 3 and a load of 5 to node 4, corresponding to a unit load distributed continuously along the rod.
At a frequency of 0.1 cycles/time ![]() is, therefore,
is, therefore,

The cross-spectral density matrices for the displacements, velocities, and accelerations of the nodes can be calculated directly from ![]() . For example, the cross-spectral density matrix of the displacements is
. For example, the cross-spectral density matrix of the displacements is
![]()
The results of the various calculations for this example are given in tables in the text below. In all cases the ABAQUS results agree with the exact solution.
Results for the three generalized coordinates in this model at times of 0.1, 0.2, and 0.3 for NORMALIZATION=DISPLACEMENT are:
| Time | Mode | |||
|---|---|---|---|---|
| 0.1 | 1 | 0.149 | 2.96 | 29.2 |
| 2 | –0.146 | –2.87 | –27.0 | |
| 3 | 0.144 | 2.80 | 25.3 | |
| 0.2 | 1 | 0.589 | 5.82 | 28.0 |
| 2 | –0.560 | –5.32 | –21.8 | |
| 3 | 0.538 | 4.94 | 16.9 | |
| 0.3 | 1 | 1.31 | 8.55 | 26.5 |
| 2 | –1.19 | –7.17 | –15.0 | |
| 3 | 1.10 | 6.12 | 6.53 |
The results for NORMALIZATION=MASS are:
| Time | Mode | |||
|---|---|---|---|---|
| 0.1 | 1 | 0.0859 | 1.71 | 16.8 |
| 2 | 0.0843 | 1.66 | 15.6 | |
| 3 | –0.0831 | –1.62 | –14.6 | |
| 0.2 | 1 | 0.340 | 3.36 | 16.2 |
| 2 | 0.323 | 3.07 | 12.6 | |
| 3 | –0.311 | –2.85 | –9.77 | |
| 0.3 | 1 | 0.756 | 4.94 | 15.3 |
| 2 | 0.687 | 4.14 | 8.65 | |
| 3 | –0.635 | –3.53 | –3.77 |
The signs of the generalized coordinates may change depending on the sign of the corresponding eigenvectors.
Physical values are obtained by summation of the modal values at each time:
For the stress and strain in the elements in this structure this gives the following results:
| Time | Element | Stress | Strain |
|---|---|---|---|
| 0.1 | 1 | 0.000206 | 0.000041 |
| 2 | 0.001870 | 0.000374 | |
| 3 | 0.2173 | 0.043452 | |
| 0.2 | 1 | 0.001797 | 0.000359 |
| 2 | 0.020377 | 0.004076 | |
| 3 | 0.8210 | 0.1642 | |
| 0.3 | 1 | 0.007051 | 0.001410 |
| 2 | 0.083857 | 0.016771 | |
| 3 | 1.708 | 0.3416 |
The values for nodal variables are calculated using the same summation method, so the displacements, velocities, accelerations, and reaction forces are:
Time history response is also obtained for an undamped system. The results for the generalized coordinates for NORMALIZATION=DISPLACEMENT are:
| Time | Mode | |||
|---|---|---|---|---|
| 0.1 | 1 | 0.150 | 2.99 | 29.8 |
| 2 | –0.149 | –2.96 | –28.7 | |
| 3 | 0.148 | 2.92 | 27.5 | |
| 0.2 | 1 | 0.598 | 5.95 | 29.3 |
| 2 | –0.582 | –5.65 | –24.8 | |
| 3 | 0.567 | 5.35 | 20.5 | |
| 0.3 | 1 | 1.34 | 8.84 | 28.4 |
| 2 | –1.26 | –7.83 | –18.6 | |
| 3 | 1.19 | 6.90 | 10.0 |
The results for NORMALIZATION=MASS are:
With the modal damping set to 10% of critical damping for all three modes, the responses of the three generalized coordinates to this base acceleration for NORMALIZATION=DISPLACEMENT are:
| Time | Mode | |||
|---|---|---|---|---|
| 0.1 | 1 | –0.00617 | –0.123 | –1.21 |
| 2 | –0.00162 | –0.0319 | –0.30 | |
| 3 | –0.00043 | –0.00834 | –0.0753 | |
| 0.2 | 1 | –0.02442 | –0.241 | –1.16 |
| 2 | –0.00622 | –0.05912 | –0.242 | |
| 3 | –0.00160 | –0.01469 | –0.0504 | |
| 0.3 | 1 | –0.05428 | –0.355 | –1.10 |
| 2 | –0.01322 | –0.07966 | –0.167 | |
| 3 | –0.003272 | –0.01821 | –0.01944 |
The results for NORMALIZATION=MASS are:
| Time | Mode | |||
|---|---|---|---|---|
| 0.1 | 1 | –0.00356 | –0.0709 | –0.698 |
| 2 | 0.000936 | 0.0184 | 0.173 | |
| 3 | 0.000247 | 0.00481 | 0.0435 | |
| 0.2 | 1 | –0.0140 | –0.139 | –0.671 |
| 2 | 0.00359 | 0.0341 | 0.140 | |
| 3 | 0.000924 | 0.00848 | 0.0291 | |
| 0.3 | 1 | –0.0313 | –0.205 | –0.636 |
| 2 | 0.00763 | 0.0460 | 0.0962 | |
| 3 | 0.00189 | 0.0105 | 0.0112 |
These responses give the following results for the nodal variables. (In this table, as in the ABAQUS output, the displacement, velocity, and acceleration values are normally given relative to the base motion: total displacement values are also given.)
| Time | Node | Displacement | Velocity | Acceleration | Total displacement |
|---|---|---|---|---|---|
| 0.1 | 1 | 0.0 | 0.0 | 0.0 | 0.0050000 |
| 2 | –0.00492 | –0.0974 | –0.9421 | 0.0000797 | |
| 3 | –0.00497 | –0.0991 | –0.9824 | 0.0000290 | |
| 4 | –0.00498 | –0.0993 | –0.9853 | 0.0000244 | |
| 0.2 | 1 | 0.0 | 0.0 | 0.0 | 0.0200000 |
| 2 | –0.01923 | –0.1872 | –0.8478 | 0.0007692 | |
| 3 | –0.01976 | –0.1964 | –0.9623 | 0.0002365 | |
| 4 | –0.01980 | –0.1970 | –0.9700 | 0.0001965 | |
| 0.3 | 1 | 0.0 | 0.0 | 0.0 | 0.0450000 |
| 2 | –0.04200 | –0.2661 | –0.7266 | 0.0030027 | |
| 3 | –0.04417 | –0.2914 | –0.9364 | 0.0008259 | |
| 4 | –0.04433 | –0.2932 | –0.9536 | 0.0006692 |
The results for the modal amplitude for NORMALIZATION=DISPLACEMENT are:
The results for NORMALIZATION=MASS are:
The response spectrum analysis gives the following results for the nodal displacements:
The results for the amplitude and phase angle of the generalized displacements (the modal amplitudes, ![]() ) for NORMALIZATION=DISPLACEMENT are shown in the table below:
) for NORMALIZATION=DISPLACEMENT are shown in the table below:
| Forcing | Mode | Amplitude, | Phase, |
|---|---|---|---|
| frequency | |||
| 0.01 | 1 | 12.48 | –0.66 |
| 2 | 1.667 | 179.8 | |
| 3 | 0.8934 | –0.1757 | |
| 0.175 | 1 | 62.2 | –90.0 |
| 2 | 1.918 | 175.2 | |
| 3 | 0.9607 | –3.304 | |
| 0.477 | 1 | 1.918 | –175.2 |
| 2 | 8.333 | 90.0 | |
| 3 | 1.835 | –17.51 |
The results for NORMALIZATION=MASS are shown in the table below:
| Forcing | Mode | Amplitude, | Phase, |
|---|---|---|---|
| frequency | |||
| 0.01 | 1 | 7.705 | –0.66 |
| 2 | 0.9627 | 179.8 | |
| 3 | 0.5158 | –0.1757 | |
| 0.175 | 1 | 35.91 | –90.0 |
| 2 | 1.107 | 175.2 | |
| 3 | 0.5546 | –3.304 | |
| 0.477 | 1 | 1.107 | –175.2 |
| 2 | 4.811 | 90.0 | |
| 3 | 1.060 | –17.51 |
Stress and strain amplitudes for element 1 and the amplitude of the reaction force at node 1 are:
| Forcing | Stress | Strain | Reaction force, |
|---|---|---|---|
| frequency | node 1 | ||
| 0.01 | 2.51 | 0.5019 | 5.019 |
| 0.175 | 15.50 | 3.10 | 31.00 |
| 0.477 | 3.988 | 0.7977 | 7.977 |
Output of the phase angle can be requested for any variable. For example, the stress in element 1 at a forcing frequency of 0.477 cycles/time has an amplitude of 3.988 and a phase angle of 90.58° with respect to the forcing function.
A third step is included in which the steady-state solution is calculated with 10% structural damping. At low frequencies (![]() 0.01) the results for this step do not differ very much from the results using modal damping, but significant differences appear at forcing frequencies in the range of the eigenfrequencies of the structure.
0.01) the results for this step do not differ very much from the results using modal damping, but significant differences appear at forcing frequencies in the range of the eigenfrequencies of the structure.
ABAQUS provides the diagonal terms of the cross-spectral density matrix; i.e., the power spectral densities. The power spectral densities of displacement, velocity, and acceleration at 0.1 cycles/time are:
Root mean square values are calculated as the square roots of the variances, which are the integrals of the power spectral densities up to the frequency of interest. The root mean square values of the nodal variables at 1 Hz are:
| Node | RMS value | RMS value | RMS value |
|---|---|---|---|
| of displacement | of velocity | of acceleration | |
| 2 | 81.51 | 134.0 | 353.7 |
| 3 | 129.3 | 158.0 | 334.2 |
| 4 | 152.9 | 207.4 | 485.6 |
The power spectral densities and the RMS values of stress and strain throughout the model are likewise calculated from ![]() and the modal vectors of the stress and strain.
and the modal vectors of the stress and strain.
*MODAL DYNAMIC analysis with a damping value of 0.1 and the structure excited by a point load applied at node 4.
*STEADY STATE DYNAMICS analysis with modal and structural damping for the given range of forcing frequencies.
*RANDOM RESPONSE analysis with structural damping.
Contains the correlation definition for use inrodlindynamic_random.inp.
*MODAL DYNAMIC analysis with composite modal damping.
*MODAL DYNAMIC analysis with damping set to 0.
*MODAL DYNAMIC analysis with *BASE MOTION.
*MODAL DYNAMIC analysis in which the excitation is caused by a static preloading of the structure, with the load removed suddenly to cause the dynamic event.
*MODAL DYNAMIC analysis with *BASE MOTION using the secondary base motion and composite modal damping.
Same as rodlindynamic_modal_subeigen.inp, except that it uses the Lanczos solver and the eigenvectors are normalized with respect to the generalized mass.
Same as rodlindynamic_respspec_subeigen.inp, except that it uses the Lanczos solver and the eigenvectors are normalized with respect to the generalized mass.
Same as rodlindynamic_ssdyn_subeigen.inp, except that the eigenvectors are normalized with respect to the generalized mass. The subspace iteration solver is used.
Same as rodlindynamic_random_subeigen.inp, except that the eigenvectors are normalized with respect to the generalized mass. The subspace iteration solver is used.
Same as rodlindynamic_ssdyn_subeigen.inp, except that the Lanczos solver is used. The eigenvectors are normalized with respect to the maximum displacement.
Same as rodlindynamic_random_subeigen.inp, except that the Lanczos solver is used. The eigenvectors are normalized with respect to the maximum displacement.