Product: ABAQUS/Standard
This example is intended to provide basic verification of the frequency-dependent spring and dashpot elements available in ABAQUS.
There are several different mechanisms that can cause damping in a system. In linear viscous damping the damping force is directly proportional to the velocity. In many cases such simple expressions for the damping forces are not available directly. However, it is possible to obtain an equivalent viscous damping coefficient by equating the loss of kinetic and strain energy to the energy dissipation. Hysteretic and viscoelastic damping are two important damping mechanisms that are more complex than linear viscous damping. In the frequency domain these mechanisms can be simulated by using dashpots with viscous damping coefficients that depend on the forcing frequency. Frequency-dependent springs will also be needed for modeling viscoelastic damping.
To illustrate how to model viscous, hysteretic, and viscoelastic damping mechanisms, springs and dashpots with constant and frequency-dependent properties will be used in frequency domain dynamic analyses of one- and two-degree-of-freedom discrete mass-spring-dashpot systems. In addition, viscous damping is modeled in the time domain by using a constant dashpot coefficient.
ABAQUS also allows for spring and dashpot properties that depend on temperature and user-defined field variables. This dependence provides an easy means to vary material properties of springs and dashpots during time-domain analysis. In doing perturbation analysis (such as frequency-domain steady-state dynamic analysis) with ABAQUS, temperature and field variable variations are not permitted within an analysis step. However, since the base state temperature and field variable values for each perturbation analysis step can be changed, it is possible to perform a multiple-step perturbation analysis that uses different temperature- and field-variable-dependent material properties that correspond to the base state temperature and field variable values. This dependence feature will be illustrated in analyses 2 and 3 described below. These two analyses employ both the direct-solution and the subspace-based steady-state dynamic procedure in ABAQUS.
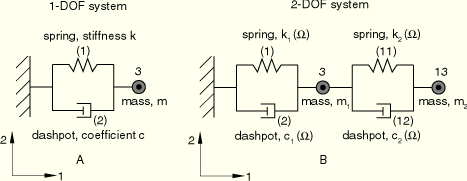
The one- and two-degree-of-freedom mass-spring-dashpot systems are shown in Figure 1.4.4–1. The following dynamic analyses are performed: (1) free vibration of the one-degree-of-freedom system after it is given an initial displacement and then released; (2) steady-state response to applied harmonic loading of the one-degree-of-freedom model with viscous damping; (3) steady-state response to applied harmonic loading of the one-degree-of-freedom model with hysteretic damping; and (4) steady-state response to applied harmonic loading of the two-degree-of-freedom model with viscoelastic damping. In all cases the forcing function is applied to the point mass closest to the anchor point, and numerical results are compared to the exact solutions for the system.
The basic constant parameters of the analysis models are as follows:
| Spring constant, k | 5253.8 N/m (30 lb/in) |
| Damping coefficient, c | 21.02 N/m-s (0.12 lb/in-s) |
| Mass, m | 4.536 kg (0.02588 lb-s2/in) |
In analysis 1 the model is the one-degree-of-freedom system shown in Figure 1.4.4–1. The initial displacement is 25.4 mm (1 in), so the force in the spring is initially 133.4 N (30 lb). The problem is run in two steps: a static step, wherein the initial displacement is imposed, and a dynamic step, during which the structure is allowed to oscillate. The dynamic step is run with automatic time stepping, using two different values for the half-step tolerance HAFTOL: 44.48 N (10 lb) and 4.448 N (1 lb). The higher value of HAFTOL should give moderately accurate results, while the lower value should result in a more accurate solution. “Implicit dynamic analysis using direct integration,” Section 6.3.2 of the ABAQUS Analysis User's Manual, gives guidelines for choosing a value for HAFTOL for realistic, multiple-degree-of-freedom systems.
In analysis 2 a harmonic loading of the form ![]() is applied to the single-degree-of-freedom system, where
is applied to the single-degree-of-freedom system, where ![]() is the circular frequency. The equation of motion for this system is
is the circular frequency. The equation of motion for this system is
![]()
Analysis 3 is identical to analysis 2 in all aspects except that hysteretic damping is modeled instead of linear viscous damping. Hysteretic damping, also known as structural or solid damping, is observed in the vibration of many solid materials and can be attributed to internal friction. This form of damping produces a hysteresis loop in the force-displacement plot for each loading cycle that is proportional to the amplitude and tends to stay constant with rising forcing frequency. The energy loss is proportional to the displacement amplitude squared for both viscous damping and for hysteretic damping. This fact suggests that structurally damped systems subjected to harmonic excitation can be modeled as viscously damped systems with an equivalent coefficient of viscous damping that is inversely proportional to the frequency: see Denhartog (1985). The equation of motion for this one-degree-of-freedom system is, thus, written readily as
![]()
![]()
Analysis 4 involves a two-degree-of-freedom system with viscoelastic damping. Viscoelastic materials are often used in a structure to improve the damping characteristics of the structure or its components. In a one-dimensional test specimen made of linear viscoelastic material, an applied cyclic stress ![]() will result in a steady-state cyclic strain response,
will result in a steady-state cyclic strain response, ![]() with the same frequency but out of phase by the phase angle
with the same frequency but out of phase by the phase angle ![]() . The phase angle is also known as the loss angle and is a function of frequency. The damping ability of the material is dependent on it and not on the stress and strain amplitude. The ratio of the stress and strain defines the complex modulus,
. The phase angle is also known as the loss angle and is a function of frequency. The damping ability of the material is dependent on it and not on the stress and strain amplitude. The ratio of the stress and strain defines the complex modulus, ![]() , where the real part is termed the storage modulus and the imaginary part the loss modulus. The equation of motion for the steady-state forced vibration of a single-degree-of-freedom viscoelastic system of mass m is simply
, where the real part is termed the storage modulus and the imaginary part the loss modulus. The equation of motion for the steady-state forced vibration of a single-degree-of-freedom viscoelastic system of mass m is simply
![]()
![]()
![]()

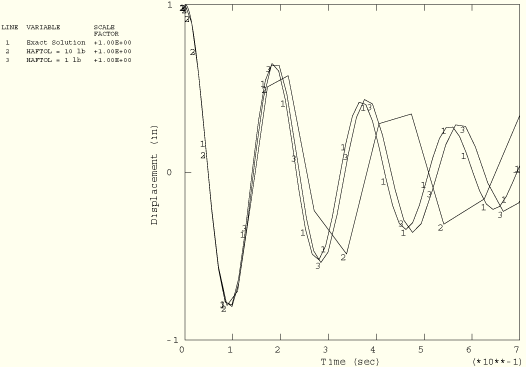
For analysis 1 the exact solution for damped free oscillation is

The exact solution and the ABAQUS solutions obtained using the different values of HAFTOL are plotted in Figure 1.4.4–2. The tighter tolerance provides the more accurate solution, showing a slight phase shift later in the response. The looser tolerance shows considerably more phase shift, as expected.
At any time during the analysis ABAQUS can provide a summary of the energy present in the structure, as well as quantities such as viscous and plastic dissipation. Summation of the various energy quantities yields an energy balance. Comparison of this balance with the initial strain energy of the system yields the energy lost due to numerical damping in the time integration operator. Table 1.4.4–1 is a summary of all the energy terms at the end of the problem (![]() 0.7 seconds). Since the initial strain energy is 1.695 N-m (15 lb-in), the numerical damping loss is 1% for the small value of HAFTOL and 9.1% for the larger value of HAFTOL.
0.7 seconds). Since the initial strain energy is 1.695 N-m (15 lb-in), the numerical damping loss is 1% for the small value of HAFTOL and 9.1% for the larger value of HAFTOL.
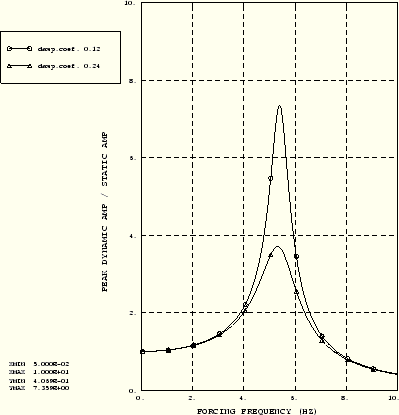
For analysis 2 the steady-state response of the viscously damped single-degree-of-freedom system subjected to a cosine forcing function is given by
![]()

![]()
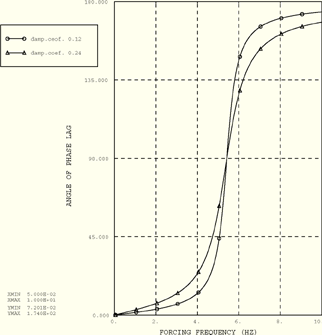
The response calculated by the *STEADY STATE DYNAMICS, DIRECT and the *STEADY STATE DYNAMICS, SUBSPACE PROJECTION procedures are in exact agreement with these solutions. The amplitude and the angle of phase lag for the frequency range of 0 to 10 cycles/time are shown in Figure 1.4.4–3 and Figure 1.4.4–4, respectively.
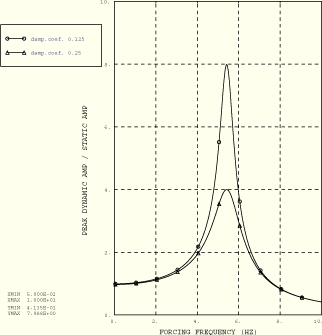
For analysis 3 the steady-state response of the structurally damped single-degree-of-freedom system subjected to a cosine forcing function can be obtained from the solutions for the viscously damped case by replacing the constant dashpot coefficient with the equivalent frequency-dependent dashpot coefficient,
![]()
![]()
The ABAQUS solutions obtained by the *STEADY STATE DYNAMICS, DIRECT and the *STEADY STATE DYNAMICS, SUBSPACE PROJECTION procedures are again in exact agreement with these analytical results, as shown in Figure 1.4.4–5 and Figure 1.4.4–6. Comparing these results with those in Figure 1.4.4–3 and Figure 1.4.4–4 for viscous damping, two differences are apparent. First, resonance (maximum amplitude) occurs at ![]() and not at
and not at ![]() as in analysis 2. Second, the phase angle for
as in analysis 2. Second, the phase angle for ![]() 0 is
0 is ![]() instead of zero as in analysis 2; therefore, motion with structural damping, where the energy dissipation is rate independent, will never be in phase with the forcing function.
instead of zero as in analysis 2; therefore, motion with structural damping, where the energy dissipation is rate independent, will never be in phase with the forcing function.
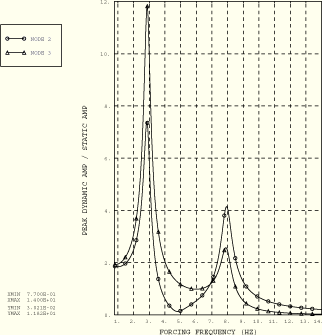
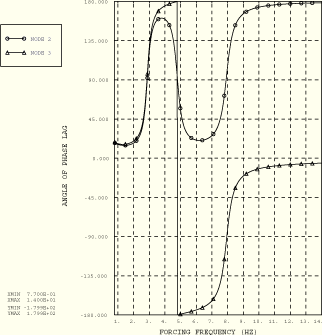
For analysis 4 the steady-state response of the two-degree-of-freedom system with viscoelastic damping is obtained numerically by solving the system of four equations for the real and imaginary parts of the response at the two nodes, from which the response amplitudes
![]()
![]()
One-degree-of-freedom time-integration dynamic analysis with HAFTOL set to 4.448 N (1 lb).
One-degree-of-freedom direct-solution and subspace-based steady-state dynamic analysis with viscous damping.
One-degree-of-freedom direct-solution and subspace-based steady-state dynamic analysis with hysteretic damping.
Two-degree-of-freedom direct-solution steady-state dynamic analysis with viscoelastic damping.
Problem with HAFTOL set to 44.48 N (10 lb).
Frequency-dependent damping coefficients used in analysis 3.
Frequency-dependent damping coefficients used in analysis 4.
Frequency-dependent spring stiffness used in analysis 4.
Table 1.4.4–1 Energy balance at 0.7 seconds.
| Solution with HAFTOL = 4.448 N (1 lb) | Solution with HAFTOL = 44.48 N (10 lb) | ||
|---|---|---|---|
| Kinetic energy | N-m | 0.0472 | 0.0033 |
| lb-in | 0.418 | 0.029 | |
| Strain energy | N-m | 0.0490 | 0.1943 |
| lb-in | 0.434 | 1.720 | |
| Dissipated energy | N-m | 1.5817 | 1.3445 |
| lb-in | 14.000 | 11.900 | |
| Total energy | N-m | 1.6780 | 1.5421 |
| lb-in | 14.852 | 13.649 | |
| Energy loss through numerical damping | N-m | 0.0167 | 0.1526 |
| lb-in | 0.148 | 1.351 | |