Product: ABAQUS/Standard
The JOINTC elements in ABAQUS/Standard provide for flexible joints between two nodes. This section defines the kinematic variables used in these elements.
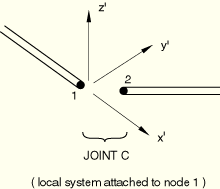
A JOINTC element consists of two nodes, referred to here as nodes 1 and 2. Each node has six degrees of freedom: displacements ![]() and rotations
and rotations ![]() . A local orientation is defined for the element by the user. In a large-displacement analysis that local system rotates with the first node of the element.
. A local orientation is defined for the element by the user. In a large-displacement analysis that local system rotates with the first node of the element.
![]()
The relative displacements in the element are then
![]()
![]()

The relative rotation about the local ![]() -axis is defined as
-axis is defined as
![]()
These rotation measures define only relative angular rotations for small relative rotations. They are simple to compute, increase monotonically for relative rotations up to 180°, and are taken as suitable for use in the elements for these reasons.
The first variation of ![]() is
is
![]()
The relative translational velocities in the element are taken as
![]()
![]()