Product: ABAQUS/Standard
ABAQUS/Standard provides a specialized analysis capability to model the steady-state behavior of a cylindrical deformable body rolling along a flat rigid surface. The capability uses a reference frame that removes the explicit time dependence from the problem so that a purely spatially dependent analysis can be performed. For an axisymmetric body traveling at a constant ground velocity and constant angular rolling velocity, a steady state is possible in a frame that moves at the speed of the ground velocity but does not spin with the body in the rolling motion. This choice of reference frame allows the finite element mesh to remain stationary so that only the part of the body in the contact zone requires fine meshing.
The kinematics of the rolling problem are described in terms of a coordinate frame that moves along with the ground motion of the body. In this moving frame the rigid body rotation is described in a spatial or Eulerian manner and the deformation in a material or Lagrangian manner. It is this kinematic description that converts the steady moving contact field problem into a purely spatially dependent simulation.
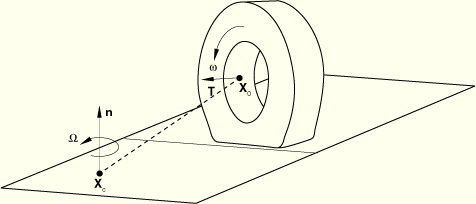
We consider the case shown in Figure 2.7.1–1, where the ground velocity of the body is described in terms of a constant cornering motion.
The body is rotating with a constant angular rolling velocity![]()
![]()
![]()
![]()
![]()
![]()
![]()

To obtain expressions for the velocity and acceleration in the reference frame tied to the body, we use the transformations
![]()
![]()

![]()
![]()
The first term in the last expression can be identified as the acceleration that gives rise to centrifugal forces resulting from rotation about ![]() . Noting that
. Noting that ![]() is a measure of velocity, the second term can be identified as the acceleration that gives rise to Coriolis forces. The last term combines the acceleration that gives rise to Coriolis and centrifugal forces resulting from rotation about
is a measure of velocity, the second term can be identified as the acceleration that gives rise to Coriolis forces. The last term combines the acceleration that gives rise to Coriolis and centrifugal forces resulting from rotation about ![]() . When the deformation is uniform along the circumferential direction, this Coriolis effect vanishes so that the acceleration gives rise to centrifugal forces only.
. When the deformation is uniform along the circumferential direction, this Coriolis effect vanishes so that the acceleration gives rise to centrifugal forces only.
The velocity of the center of the body ![]() (which must lie on the axis
(which must lie on the axis ![]() ) is
) is
![]()
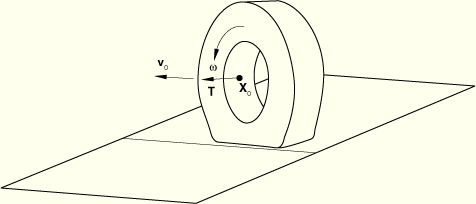
To obtain the expression for straight line motion, as shown in Figure 2.7.1–2, we move ![]() far away from the center of the body
far away from the center of the body ![]() but keep
but keep ![]() the same. In that case
the same. In that case ![]() and, hence, in the limit
and, hence, in the limit
![]()
![]()
The virtual work contribution from the d'Alembert forces is
![]()


To obtain the contact conditions, we start with the expressions for velocity derived in the previous section. For points on the surface of the deformable body
![]()
![]()
![]()
![]()
![]()
Similarly, the rate of slip is
![]()
![]()
![]()
![]()
![]()
To complete the formulation, a relationship between frictional stress and slip velocity must be developed. A Coulomb friction law is provided for steady-state rolling. The law assumes that slip occurs if the frictional stress,
![]()
![]()
![]()
![]()
These expressions contribute to the standard virtual work contribution for slip,
![]()
![]()