Product: ABAQUS/Standard
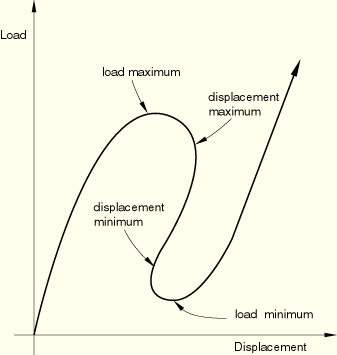
It is often necessary to obtain nonlinear static equilibrium solutions for unstable problems, where the load-displacement response can exhibit the type of behavior sketched in Figure 2.3.2–1—that is, during periods of the response, the load and/or the displacement may decrease as the solution evolves. The modified Riks method is an algorithm that allows effective solution of such cases.
It is assumed that the loading is proportional—that is, that all load magnitudes vary with a single scalar parameter. In addition, we assume that the response is reasonably smooth—that sudden bifurcations do not occur. Several methods have been proposed and applied to such problems. Of these, the most successful seems to be the modified Riks method—see, for example, Crisfield (1981), Ramm (1981), and Powell and Simons (1981)—and a version of this method has been implemented in ABAQUS. The essence of the method is that the solution is viewed as the discovery of a single equilibrium path in a space defined by the nodal variables and the loading parameter. Development of the solution requires that we traverse this path as far as required. The basic algorithm remains the Newton method; therefore, at any time there will be a finite radius of convergence. Further, many of the materials (and possibly loadings) of interest will have path-dependent response. For these reasons, it is essential to limit the increment size. In the modified Riks algorithm, as it is implemented in ABAQUS, the increment size is limited by moving a given distance (determined by the standard, convergence rate-dependent, automatic incrementation algorithm for static case in ABAQUS/Standard) along the tangent line to the current solution point and then searching for equilibrium in the plane that passes through the point thus obtained and that is orthogonal to the same tangent line. Here the geometry referred to is the space of displacements, rotations, and the load parameter mentioned above.
Let ![]() = the degrees of freedom of the model) be the loading pattern, as defined with one or more of the loading options in ABAQUS. Let
= the degrees of freedom of the model) be the loading pattern, as defined with one or more of the loading options in ABAQUS. Let ![]() be the load magnitude parameter, so at any time the actual load state is
be the load magnitude parameter, so at any time the actual load state is ![]() , and let
, and let ![]() be the displacements at that time.
be the displacements at that time.
The solution space is scaled to make the dimensions approximately the same magnitude on each axis. In ABAQUS this is done by measuring the maximum absolute value of all displacement variables, ![]() , in the initial (linear) iteration. We also define
, in the initial (linear) iteration. We also define ![]() . The scaled space is then spanned by
. The scaled space is then spanned by
load ![]() ,
,
displacements ![]()
Suppose the solution has been developed to the point ![]() . The tangent stiffness,
. The tangent stiffness, ![]() , is formed, and we solve
, is formed, and we solve
![]()
![]()
![]()
![]()
![]()
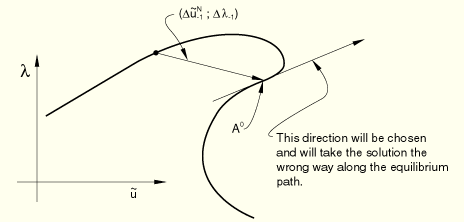
It is possible that in some cases, where the response shows very high curvature in the ![]() space, this criterion will cause the wrong sign to be chosen—see, for example, Figure 2.3.2–3.
space, this criterion will cause the wrong sign to be chosen—see, for example, Figure 2.3.2–3.
Initialize: ![]()
For ![]() iteration
iteration ![]() :
:
Form ![]() the internal (stress) forces at the nodes,
the internal (stress) forces at the nodes,
![]()
Check equilibrium:
![]()
Solve:
![]()
Now scale the vector ![]() , and add it to
, and add it to ![]() where
where ![]() is the projection of the scaled residuals onto
is the projection of the scaled residuals onto ![]() so that we move from
so that we move from ![]() to
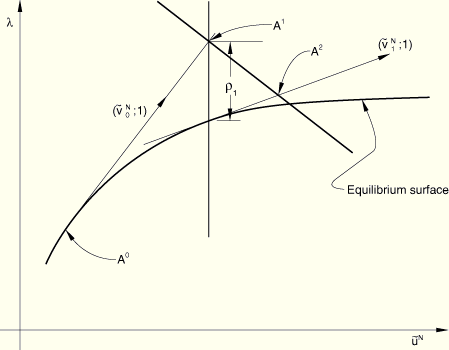
to ![]() in the plane orthogonal to
in the plane orthogonal to ![]() —see Figure 2.3.2–2. This gives the equation
—see Figure 2.3.2–2. This gives the equation
![]()
![]()
![]()
Update for the next iteration,
The implementation in ABAQUS/Standard includes the additional update after each iteration:
![]()
The total path length traversed is determined by the load magnitudes supplied by the user on the loading options; while the number of increments is determined by the user-specified time increment data, assisted by ABAQUS/Standard's automatic incrementation scheme if that is chosen.