There are two reasons for adding damping to a model: to limit numerical oscillations or to add physical damping to the system. ABAQUS/Explicit provides several methods of introducing damping into the analysis.
Bulk viscosity introduces damping associated with volumetric straining. Its purpose is to improve the modeling of high-speed dynamic events. ABAQUS/Explicit contains linear and quadratic forms of bulk viscosity. You can set bulk viscosity to nondefault values from step to step by using the *BULK VISCOSITY option, although it is rarely necessary to do so. The bulk viscosity pressure is not included in the material point stresses because it is intended as a numerical effect only. As such, it is not considered part of the material's constitutive response.
Linear bulk viscosity
By default, linear bulk viscosity is always included to damp “ringing” in the highest element frequency. It generates a bulk viscosity pressure that is linear in the volumetric strain rate, according to the following equation:
![]()
Quadratic bulk viscosity
Quadratic bulk viscosity is included only in continuum elements (except for the plane stress element, CPS4R) and is applied only if the volumetric strain rate is compressive. The bulk viscosity pressure is quadratic in the strain rate, according to the following equation:
![]()
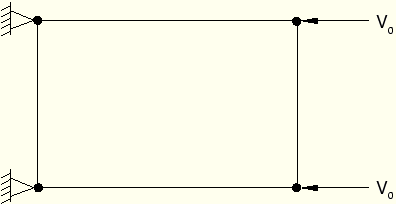
The quadratic bulk viscosity smears a shock front across several elements and is introduced to prevent elements from collapsing under extremely high velocity gradients. Consider a simple one-element problem in which the nodes on one side of the element are fixed and the nodes on the other side have an initial velocity in the direction of the fixed nodes, as shown in Figure 3–16. The stable time increment size is precisely the transit time of a dilatational wave across the element. Therefore, if the initial nodal velocity is equal to the dilatational wave speed of the material, the element collapses to zero volume in one time increment. The quadratic bulk viscosity pressure introduces a resisting pressure that prevents the element from collapsing.
Fraction of critical damping due to bulk viscosity
The bulk viscosity pressures are based on only the dilatational modes of each element. The fraction of critical damping in the highest element mode is given by the following equation:
![]()
Viscous pressure loads are commonly used in structural problems and quasi-static problems to damp out the low-frequency dynamic effects, thus allowing static equilibrium to be reached in a minimal number of increments. These loads are applied as distributed loads (*DLOAD) defined by the following formula:
![]()
The material model itself may provide damping in the form of plastic dissipation or viscoelasticity. For many applications such damping may be adequate. Another option is to use Rayleigh damping defined using the *DAMPING option, which is part of the *MATERIAL option block. There are two damping factors associated with Rayleigh damping: ![]() for mass proportional damping and
for mass proportional damping and ![]() for stiffness proportional damping.
for stiffness proportional damping.
Mass proportional damping
The ![]() factor defines a damping contribution proportional to the mass matrix for an element. The damping forces that are introduced are caused by the absolute velocities of nodes in the model. The resulting effect can be likened to the model moving through a viscous fluid so that any motion of any point in the model triggers damping forces. Reasonable mass proportional damping does not reduce the stability limit significantly.
factor defines a damping contribution proportional to the mass matrix for an element. The damping forces that are introduced are caused by the absolute velocities of nodes in the model. The resulting effect can be likened to the model moving through a viscous fluid so that any motion of any point in the model triggers damping forces. Reasonable mass proportional damping does not reduce the stability limit significantly.
Stiffness proportional damping
The ![]() factor defines damping proportional to the elastic material stiffness. A “damping stress,”
factor defines damping proportional to the elastic material stiffness. A “damping stress,” ![]() , proportional to the total strain rate is introduced, using the following formula:
, proportional to the total strain rate is introduced, using the following formula:
![]()
Yet another option is to define individual dashpot elements. Each dashpot element provides a damping force proportional to the relative velocity of its two nodes. The advantage of this approach is that it enables you to apply damping only at points where you decide it is necessary. Dashpots always should be used in parallel with other elements, such as springs or trusses, so that they do not cause a significant reduction in the stability limit.