A dynamic simulation is one in which inertia forces are included in the dynamic equation of equilibrium:
![]()
![]()
is the mass of the structure,
![]()
is the acceleration of the structure,
![]()
are the internal forces in the structure, and
![]()
are the applied external forces.
The inclusion of the inertial forces (![]() ) in the equation of equilibrium is the major difference between static and dynamic analyses. Another difference between the two types of simulations is in the definition of the internal forces,
) in the equation of equilibrium is the major difference between static and dynamic analyses. Another difference between the two types of simulations is in the definition of the internal forces, ![]() . In a static analysis the internal forces arise only from the deformation of the structure; in a dynamic analysis the internal forces contain contributions created by both the motion (i.e., damping) and the deformation of the structure.
. In a static analysis the internal forces arise only from the deformation of the structure; in a dynamic analysis the internal forces contain contributions created by both the motion (i.e., damping) and the deformation of the structure.
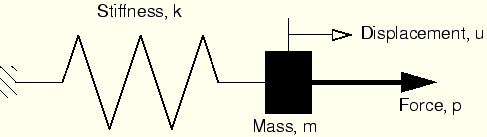
The simplest dynamic problem is that of a mass oscillating on a spring, as shown in Figure 9–1.
The internal force in the spring is given by ![]() so that its dynamic equation of motion is
so that its dynamic equation of motion is
![]()
![]()
If the mass is moved and then released, it will oscillate at this frequency. If the force is applied at this frequency, the amplitude of the displacement will increase dramatically—a phenomenon known as resonance.
Real structures have a large number of natural frequencies. It is important to design structures in such a way that the frequencies at which they may be loaded are not close to the natural frequencies. The natural frequencies can be determined by considering the dynamic response of the unloaded structure (![]() in the dynamic equilibrium equation). The equation of motion is then
in the dynamic equilibrium equation). The equation of motion is then
![]()
![]()
![]()
![]()
This system has ![]() eigenvalues, where
eigenvalues, where ![]() is the number of degrees of freedom in the finite element model. Let
is the number of degrees of freedom in the finite element model. Let ![]() be the jth eigenvalue. Its square root,
be the jth eigenvalue. Its square root, ![]() , is the natural frequency of the jth mode of the structure, and
, is the natural frequency of the jth mode of the structure, and ![]() is the corresponding jth eigenvector. The eigenvector is also known as the mode shape because it is the deformed shape of the structure as it vibrates in the jth mode.
is the corresponding jth eigenvector. The eigenvector is also known as the mode shape because it is the deformed shape of the structure as it vibrates in the jth mode.
In ABAQUS the *FREQUENCY procedure is used to extract the modes and frequencies of the structure. This procedure is easy to use in that you need only specify the number of modes required or the maximum frequency of interest.
The natural frequencies and mode shapes of a structure can be used to characterize its dynamic response to loads in the linear regime. The deformation of the structure can be calculated from a combination of the mode shapes of the structure using the modal superposition technique. Each mode shape is multiplied by a scale factor. The vector of displacements in the model, ![]() , is defined as
, is defined as
![]()
In structural dynamic problems the response of a structure usually is dominated by a relatively small number of modes, making modal superposition a particularly efficient method for calculating the response of such systems. Consider a model containing 10,000 degrees of freedom. Direct integration of the dynamic equations of motion would require the solution of 10,000 simultaneous equations at each point in time. If the structural response is characterized by 100 modes, only 100 equations need to be solved every time step. Moreover, the modal equations are uncoupled, whereas the original equations of motion are coupled. There is an initial cost in calculating the modes and frequencies, but the savings obtained in the calculation of the response greatly outweighs the cost.
If nonlinearities are present in the simulation, the natural frequencies may change significantly during the analysis, and modal superposition cannot be employed. In this case direct integration of the dynamic equation of equilibrium is required, which is much more expensive than modal analysis.
A problem should have the following characteristics for it to be suitable for linear transient dynamic analysis:
The system should be linear: linear material behavior, no contact conditions, and no nonlinear geometric effects.
The response should be dominated by relatively few frequencies. As the frequency content of the response increases, such as is the case in shock and impact problems, the modal superposition technique becomes less effective.
The dominant loading frequencies should be in the range of the extracted frequencies to ensure that the loads can be described accurately.
The initial accelerations generated by any suddenly applied loads should be described accurately by the eigenmodes.
The system should not be damped heavily.