You can define the beam profile in one of three ways: by choosing from the ABAQUS cross-section library and specifying the shape and dimensions of the beam cross-section; by defining a generalized beam profile using section engineering properties, such as area and moments of inertia; or by using a mesh of special two-dimensional elements for which geometric quantities are calculated numerically, called a meshed beam cross-section.
ABAQUS offers a variety of common cross-section shapes, as shown in Figure 6–1, should you decide to define the beam profile geometrically. You can also define almost any thin-walled cross-section using the arbitrary cross-section definition. For a detailed discussion of the beam cross-sections available in ABAQUS, see “Beam cross-section library,” Section 15.3.9 of the ABAQUS Analysis User's Manual.
If you define a beam profile using one of the built-in cross-sections in the ABAQUS library, ABAQUS/CAE prompts you for the required cross-section dimensions, which are different for each type of cross-section. When the beam profile is associated with a beam section property, you can specify whether to have the section engineering properties calculated during the analysis or to have ABAQUS precompute them (at the beginning of the analysis). The former option can be used when the material behavior is either linear or nonlinear (for example, if the section stiffness changes due to inelastic yielding); the latter option is more efficient, however, for linear elastic material behavior.
Alternatively, you can provide the section engineering properties (area, moments of inertia, and torsional constants) instead of the cross-section dimensions. The material behavior may be either linear or nonlinear. Thus, you can combine the beam's geometry and material behavior to define its response to loads, which may be linear or nonlinear. See “Using a general beam section to define the section behavior,” Section 15.3.7 of the ABAQUS Analysis User's Manual, for further details.
Meshed beam cross-sections allow a description of the beam cross-section that includes multiple materials and complex geometry. This type of beam profile is discussed further in “Meshed beam cross-sections,” Section 7.14.1 of the ABAQUS Analysis User's Manual.
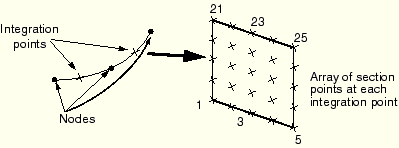
When you define the beam cross-section using a built-in profile from the ABAQUS cross-section library and request that section engineering properties be calculated during the analysis, ABAQUS calculates the beam element's response at an array of section points throughout the beam cross-section. The number of section points, as well as the section point locations, are shown in “Beam cross-section library,” Section 15.3.9 of the ABAQUS Analysis User's Manual. Element output variables, such as stress and strain, are available at any of the section points; however, by default output is provided at only a select number of section points, as described in “Beam cross-section library,” Section 15.3.9 of the ABAQUS Analysis User's Manual. All the section points for a rectangular cross-section are shown in Figure 6–2.
For this cross-section output is provided at points 1, 5, 21, and 25 by default. The beam element shown in Figure 6–2 uses a total of 50 section points, 25 at each of the two integration points, to calculate its stiffness.When you request that the beam section properties be precomputed, ABAQUS does not calculate the beam's response at the section points. Instead, it uses the section engineering properties to determine the section response. Therefore, ABAQUS uses section points only as locations for output, and you need to specify the section points at which you desire output.
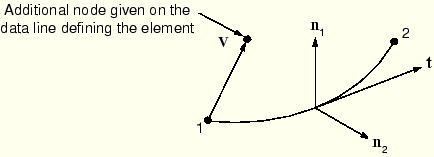
You must define the orientation of a beam's cross-section in global Cartesian space. The local tangent along the beam element, ![]() , is defined as the vector from the first node of the element to the next node. The beam cross-section is perpendicular to this local tangent. The local (1–2) beam section axes are represented by the vectors
, is defined as the vector from the first node of the element to the next node. The beam cross-section is perpendicular to this local tangent. The local (1–2) beam section axes are represented by the vectors ![]() and
and ![]() . The three vectors
. The three vectors ![]() ,
, ![]() , and
, and ![]() form a local, right-handed, coordinate system (see Figure 6–3).
form a local, right-handed, coordinate system (see Figure 6–3).
The ![]() -direction is always (0.0, 0.0, –1.0) for two-dimensional beam elements.
-direction is always (0.0, 0.0, –1.0) for two-dimensional beam elements.
For three-dimensional beam elements there are several ways to define the orientation of the local beam section axes. The first is to specify an extra node on the data line defining the element (this method requires manually editing the input file created by ABAQUS/CAE). The vector, ![]() , from the first node in the beam element to this additional node (see Figure 6–3), is used initially as an approximate
, from the first node in the beam element to this additional node (see Figure 6–3), is used initially as an approximate ![]() -direction. ABAQUS then defines the beam's
-direction. ABAQUS then defines the beam's ![]() -direction as
-direction as ![]() . Having determined
. Having determined ![]() , ABAQUS defines the actual
, ABAQUS defines the actual ![]() -direction as
-direction as ![]() . This procedure ensures that the local tangent and local beam section axes form an orthogonal system.
. This procedure ensures that the local tangent and local beam section axes form an orthogonal system.
Alternatively, you can give an approximate ![]() -direction when you define the beam section properties in ABAQUS/CAE. ABAQUS then uses the procedure described above to calculate the actual beam section axes. If you specify both an extra node and an approximate
-direction when you define the beam section properties in ABAQUS/CAE. ABAQUS then uses the procedure described above to calculate the actual beam section axes. If you specify both an extra node and an approximate ![]() -direction, the additional node method takes precedence. ABAQUS uses the vector from the origin to the point (0.0, 0.0, –1.0) as the default
-direction, the additional node method takes precedence. ABAQUS uses the vector from the origin to the point (0.0, 0.0, –1.0) as the default ![]() -direction if you provide no approximate
-direction if you provide no approximate ![]() -direction.
-direction.
There are two methods that can be used to override the ![]() -direction defined by ABAQUS; both require editing the input file manually. One is to give the components of
-direction defined by ABAQUS; both require editing the input file manually. One is to give the components of ![]() as the 4th, 5th, and 6th data values following the nodal coordinates. The alternative is to specify the normal direction directly with the *NORMAL option (this option can be added using the ABAQUS/CAE Keywords Editor). If both methods are used, the latter takes precedence. ABAQUS again defines the
as the 4th, 5th, and 6th data values following the nodal coordinates. The alternative is to specify the normal direction directly with the *NORMAL option (this option can be added using the ABAQUS/CAE Keywords Editor). If both methods are used, the latter takes precedence. ABAQUS again defines the ![]() -direction as
-direction as ![]() .
.
The ![]() -direction that you provide need not be orthogonal to the beam element tangent,
-direction that you provide need not be orthogonal to the beam element tangent, ![]() . When you provide the
. When you provide the ![]() -direction, the local beam element tangent is redefined as the value of the cross-product
-direction, the local beam element tangent is redefined as the value of the cross-product ![]() . It is quite possible in this situation that the redefined local beam tangent,
. It is quite possible in this situation that the redefined local beam tangent, ![]() , will not align with the beam axis, as defined by the vector from the first to the second node. If the
, will not align with the beam axis, as defined by the vector from the first to the second node. If the ![]() -direction subtends an angle greater than 20° with the plane perpendicular to the element axis, ABAQUS issues a warning message in the data file.
-direction subtends an angle greater than 20° with the plane perpendicular to the element axis, ABAQUS issues a warning message in the data file.
The example presented in “Example: cargo crane,” Section 6.4, explains how to assign the beam cross-section orientation using ABAQUS/CAE.
The curvature of beam elements is based on the orientation of the beam's ![]() -direction relative to the beam axis. If the
-direction relative to the beam axis. If the ![]() -direction and the beam axis are not orthogonal (i.e., the beam axis and the tangent,
-direction and the beam axis are not orthogonal (i.e., the beam axis and the tangent, ![]() , do not coincide), the beam element is considered to be curved initially. Since the behavior of curved beams is different from the behavior of straight beams, you should always check your model to ensure that the correct normals and, hence, the correct curvatures are used. For beams and shells ABAQUS uses the same algorithm to determine the normals at nodes shared by several elements. A description is given in “Beam element cross-section orientation,” Section 15.3.4 of the ABAQUS Analysis User's Manual.
, do not coincide), the beam element is considered to be curved initially. Since the behavior of curved beams is different from the behavior of straight beams, you should always check your model to ensure that the correct normals and, hence, the correct curvatures are used. For beams and shells ABAQUS uses the same algorithm to determine the normals at nodes shared by several elements. A description is given in “Beam element cross-section orientation,” Section 15.3.4 of the ABAQUS Analysis User's Manual.
If you intend to model curved beam structures, you should probably use one of the two methods described earlier to define the ![]() -direction directly, allowing you great control in modeling the curvature. Even if you intend to model a structure made up of straight beams, curvature may be introduced as normals are averaged at shared nodes. You can rectify this problem by defining the beam normals directly as explained previously.
-direction directly, allowing you great control in modeling the curvature. Even if you intend to model a structure made up of straight beams, curvature may be introduced as normals are averaged at shared nodes. You can rectify this problem by defining the beam normals directly as explained previously.
When beam elements are used as stiffeners for shell models, it is convenient to have the beam and shell elements share the same nodes. Shell element nodes are located at the midplane of the shell, and beam element nodes are located somewhere in the cross-section of the beam. Hence, if the shell and beam elements share the same nodes, the shell and the beam stiffener will overlap unless the beam cross-section is offset from the location of the node (see Figure 6–4).
Figure 6–4 Using beams as stiffeners for shell models: (a) without offset of beam sections; (b) with offset of beam sections.
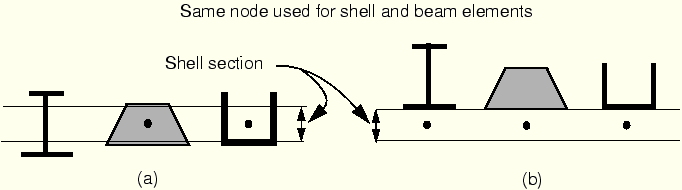
With beam section types I, TRAPEZOID, and ARBITRARY it is possible to specify that the section geometry is located at some distance from the origin of the section's local coordinate system, which is located at the element's nodes. Since it is easy to offset beams with such cross-sections from their nodes, they can be used readily as stiffeners as shown in Figure 6–4(b). (If flange or web buckling of the stiffeners is important, shells should be used to model the stiffeners.)
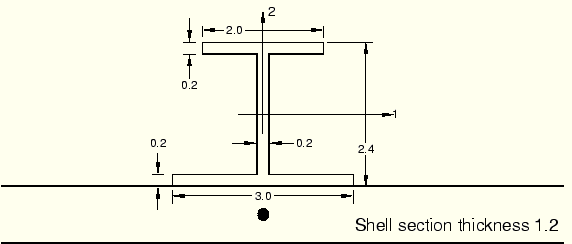
The I-beam shown in Figure 6–5 is attached to a shell 1.2 units thick. The beam section can be oriented as it is shown in the figure by defining the offset of the beam node from the bottom of the I-section. The offset in this case would be –0.6; i.e., one half of the shell thickness.
You can also specify the location of the centroid and shear center; these locations can be offset from the beam node, thus enabling you to model stiffeners readily.
It is also possible to define the beam nodes and shell nodes separately and connect the beam and shell using a rigid beam constraint between the two nodes. See “Linear constraint equations,” Section 20.2.1 of the ABAQUS Analysis User's Manual, for further details.