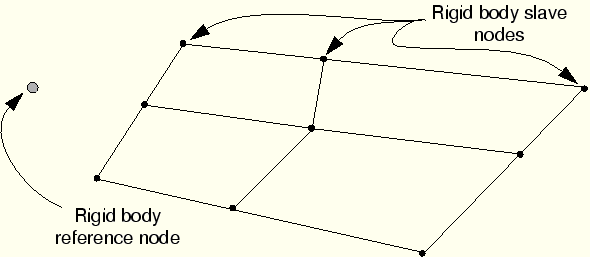
In ABAQUS a rigid body is a collection of nodes and elements whose motion is governed by the motion of a single node, known as the rigid body reference node, as shown in Figure 3–7.
The shape of the rigid body is defined either as an analytical surface obtained by revolving or extruding a two-dimensional geometric profile or as a discrete rigid body obtained by meshing the body with nodes and elements. The shape of the rigid body does not change during a simulation but can undergo large rigid body motions. The mass and inertia of a discrete rigid body can be calculated based on the contributions from its elements, or they can be assigned specifically.The motion of a rigid body can be prescribed by applying boundary conditions at the rigid body reference node. Loads on a rigid body are generated from concentrated loads applied to nodes and distributed loads applied to elements that are part of the rigid body or from loads applied to the rigid body reference node. Rigid bodies interact with the rest of the model through nodal connections to deformable elements and through contact with deformable elements.
The use of rigid bodies is illustrated in Chapter 12, “Contact.”
Rigid bodies can be used to model very stiff components that are either fixed or undergoing large rigid body motions. They can also be used to model constraints between deformable components, and they provide a convenient method of specifying certain contact interactions. When ABAQUS is used for quasi-static forming analyses, rigid bodies are ideally suited for modeling tooling (such as punch, die, drawbead, blank holder, roller, etc.) and may also be effective as a method of constraint.
It may be useful to make parts of a model rigid for verification purposes. For example, in complex models elements far away from the particular region of interest could be included as part of a rigid body, resulting in faster run times at the model development stage. When you are satisfied with the model, you can remove the rigid body definitions and incorporate an accurate deformable finite element representation throughout.
The principal advantage to representing portions of a model with rigid bodies rather than deformable finite elements is computational efficiency. Element-level calculations are not performed for elements that are part of a rigid body. Although some computational effort is required to update the motion of the nodes of the rigid body and to assemble concentrated and distributed loads, the motion of the rigid body is determined completely by a maximum of six degrees of freedom at the rigid body reference node.
In ABAQUS/Explicit rigid bodies are particularly effective for modeling relatively stiff parts of a structure for which tracking waves and stress distributions is not important. Element stable time increment estimates in the stiff region can result in a very small global time increment. Since rigid bodies and elements that are part of a rigid body do not affect the global time increment, using a rigid body instead of a deformable finite element representation in a stiff region can result in a much larger global time increment, without significantly affecting the overall accuracy of the solution.
Rigid bodies defined with analytical rigid surfaces in ABAQUS are slightly cheaper in terms of computational cost than discrete rigid bodies. In ABAQUS/Explicit, for example, contact with analytical rigid surfaces tends to be less noisy than contact with discrete rigid bodies because analytical rigid surfaces can be smooth, whereas discrete rigid bodies are inherently faceted. However, the shapes that can be defined with analytical rigid surfaces are limited.
The motion of a rigid body is controlled by the motion of a single node: the rigid body reference node. A rigid body reference node has both translational and rotational degrees of freedom and must be defined uniquely for every rigid body.
The position of the rigid body reference node is not important unless rotations are applied to the body or reaction moments about a certain axis through the body are desired. In either of these situations the node should be placed such that it lies on the desired axis through the body.
In addition to the rigid body reference node, discrete rigid bodies consist of a collection of nodes that are generated by assigning elements and nodes to the rigid body. These nodes, known as the rigid body slave nodes (see Figure 3–7), provide a connection to other elements. Nodes that are part of a rigid body are one of two types:
Pin nodes, which have only translational degrees of freedom.
Tie nodes, which have both translational and rotational degrees of freedom.
The rigid body node type is determined by the type of elements on the rigid body to which the node is attached. The node type also can be specified or modified when assigning nodes directly to a rigid body. For pin nodes only the translational degrees of freedom are part of the rigid body, and the motion of these degrees of freedom is constrained by the motion of the rigid body reference node. For tie nodes both the translational and rotational degrees of freedom are part of the rigid body and are constrained by the motion of the rigid body reference node.
The nodes defining the rigid body cannot have any boundary conditions, multi-point constraints, or constraint equations applied to them. Boundary conditions, multi-point constraints, constraint equations, and loads can be applied, however, to the rigid body reference node.
The rigid body capability in ABAQUS allows most elements—not just rigid elements—to be part of a rigid body. For example, shell elements or rigid elements can be used to model the same effect as long as the elements are assigned to the rigid body. The rules governing rigid bodies, such as how loads and boundary conditions are applied, pertain to all element types that form the rigid body, including rigid elements.
The names of all rigid elements begin with the letter “R.” The next characters indicate the dimensionality of the element. For example, “2D” indicates that the element is planar; and “AX,” that the element is axisymmetric. The final character represents the number of nodes in the element.
Rigid element library
The three-dimensional quadrilateral (R3D4) and triangular (R3D3) rigid elements are used to model the two-dimensional surfaces of a three-dimensional rigid body. Another element—a two-node, rigid beam element (RB3D2)—is provided in ABAQUS/Standard mainly to model components of offshore structures to which fluid drag and buoyancy loads must be applied.
Two-node, rigid elements are available for plane strain, plane stress, and axisymmetric models. A planar, two-node rigid beam element is also available in ABAQUS/Standard and is used mainly to model offshore structures in two dimensions.
Degrees of freedom
Only the rigid body reference node has independent degrees of freedom. For three-dimensional elements the reference node has three translational and three rotational degrees of freedom; for planar and axisymmetric elements the reference node has degrees of freedom 1, 2, and 6 (rotation about the 3-axis).
The nodes attached to rigid elements have only slave degrees of freedom. The motion of the slave degrees of freedom is determined entirely from the motion of the rigid body reference node. For planar and three-dimensional rigid elements the only slave degrees of freedom are translations. The rigid beam elements in ABAQUS/Standard have the same slave degrees of freedom as the corresponding deformable beam elements: 1–6 for the three-dimensional rigid beam and 1, 2, and 6 for the planar rigid beam.
Physical properties
All rigid elements must refer to a section property. For the planar and rigid beam elements the cross-sectional area can be defined. For the axisymmetric and three-dimensional elements the thickness can be defined. The default thickness is zero. These data are required only if you apply body forces to the rigid elements or, in ABAQUS/Explicit, when the thickness is needed for the contact definition.
Formulation and integration
Since the rigid elements are not deformable, they do not use numerical integration points, and there are no optional formulations.
Element output variables
There are no element output variables. The only output from rigid elements is the motion of the nodes. In addition, reaction forces and reaction moments are available at the rigid body reference node.