Product: ABAQUS/Standard
This example is intended to provide basic verification of the slip-rate-dependent friction models in ABAQUS for static and dynamic analysis. Two slip-rate-dependent friction models are implemented. One is an extended form of the classical Coulomb friction model in which the friction coefficient can be defined in terms of slip rate, contact pressure, surface temperature, and field variables. In the second model the user provides a static friction coefficient, a kinetic friction coefficient, and a decay parameter. The static friction coefficient decays exponentially to the kinetic friction coefficient. This model is referred to as the exponential decay friction model and is selected with the EXPONENTIAL DECAY parameter on the *FRICTION option.
This problem also illustrates the use of the *CONTACT INTERFERENCE and *CHANGE FRICTION options.
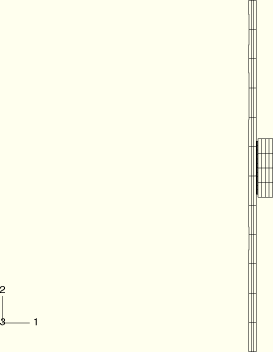
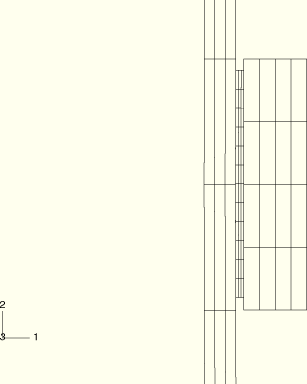
The model consists of a rod, a sliding cylinder, and a compound that is tightly fit between the rod and the cylinder. Both axisymmetric and three-dimensional models are created. Figure 3.2.13–1 shows the axisymmetric model. A detail of the compound between the rod and the cylinder is shown in Figure 3.2.13–2. The inner radius of the rod is 19 mm (3/4 inch), and the outer radius is 25.4 mm (1 inch). The rod is 304.8 mm (12 inches) long and fixed at both ends. The inner radius of the sliding cylinder is 27 mm (1 1/16 inches), has a thickness of 12.7 mm (1/2 inch), and is 50.8 mm (2 inches) long. The initial thickness of the compound is larger than the 1.6 mm (1/16 inch) gap; the compound is confined between the rod and the cylinder.
All parts of the model are elastic. The Young's modulus, Poisson's ratio, and density for the rod and the cylinder are 207 GPa (30.0 × 106 psi), 0.3, and 7800 kg/m3 (0.73 × 10–3 lbf s2/ in4), respectively. The compound has a Young's modulus of 6.9 GPa (1.0 × 106 psi), a Poisson's ratio of 0.2, and a density of 1069 kg/m3 (0.1 × 10–3 lbf s2/ in4).
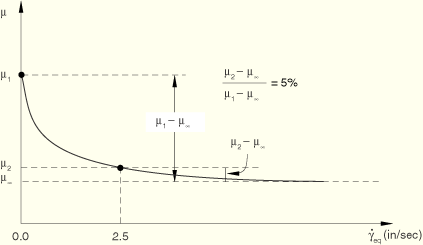
It is assumed that the interface between the slider and the compound is rough; i.e., no slip can occur when contact is established. The rough surface interface is modeled with the Lagrange friction model and a high friction coefficient. It is assumed that the interface between the rod and the compound is polished and has a static friction coefficient ![]() . Experimental tests show that the dynamic friction coefficient,
. Experimental tests show that the dynamic friction coefficient, ![]() , is 0.1 for a slip rate equal to 2.5 inches per second. Furthermore, the static coefficient decays exponentially to the kinetic friction coefficient,
, is 0.1 for a slip rate equal to 2.5 inches per second. Furthermore, the static coefficient decays exponentially to the kinetic friction coefficient, ![]() , according to
, according to ![]() , where
, where ![]() is the decay coefficient. The dynamic coefficient at higher slip rates is not known; hence, the default ABAQUS assumption that the ratio
is the decay coefficient. The dynamic coefficient at higher slip rates is not known; hence, the default ABAQUS assumption that the ratio ![]() to
to ![]() is 5% is used. The idealized friction model is illustrated in Figure 3.2.13–3 and is specified with the TEST DATA parameter on the *FRICTION option. ABAQUS calculates the kinetic friction coefficient and the decay parameter. For the cases that use the Coulomb friction model, the data for the friction coefficient and the corresponding slip rate have been provided in tabular form.
is 5% is used. The idealized friction model is illustrated in Figure 3.2.13–3 and is specified with the TEST DATA parameter on the *FRICTION option. ABAQUS calculates the kinetic friction coefficient and the decay parameter. For the cases that use the Coulomb friction model, the data for the friction coefficient and the corresponding slip rate have been provided in tabular form.
The compound material is tightly fit between the rod and the slider in the first step of the analysis. The initial overclosure is resolved with the *CONTACT INTERFERENCE option.
Friction is introduced in the second step with the *CHANGE FRICTION option. The contact interference option is removed. No loads are specified in this step to ensure that contact and equilibrium are established.
A harmonic sliding motion of the form ![]() is applied to the cylinder. The amplitude,
is applied to the cylinder. The amplitude, ![]() , is equal to 101.6 mm (4.0 inches), and the frequency,
, is equal to 101.6 mm (4.0 inches), and the frequency, ![]() , is equal to
, is equal to ![]() rad/second. This form of harmonic motion is selected since it produces a zero velocity and avoids an intantaneous acceleration jump at the beginning of the dynamic step. A dynamic analysis is performed for 10 seconds to complete one full cycle of harmonic load in Step 3. Another harmonic cycle is completed using a static analysis in Step 4.
rad/second. This form of harmonic motion is selected since it produces a zero velocity and avoids an intantaneous acceleration jump at the beginning of the dynamic step. A dynamic analysis is performed for 10 seconds to complete one full cycle of harmonic load in Step 3. Another harmonic cycle is completed using a static analysis in Step 4.
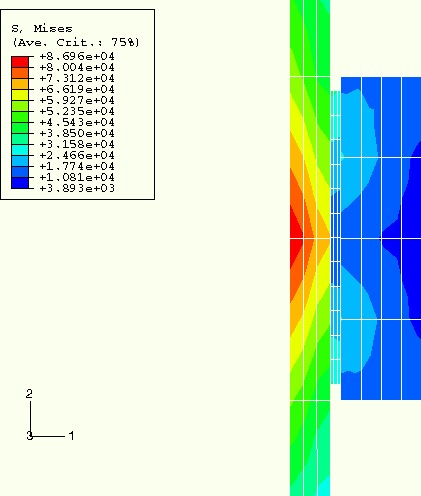
The contact pressure distribution between the compound and the rod is nonuniform. This can be attributed to the deformation of the rod when the compound material is clamped between the rod and the cylinder. The Mises contour plot is shown in Figure 3.2.13–4.
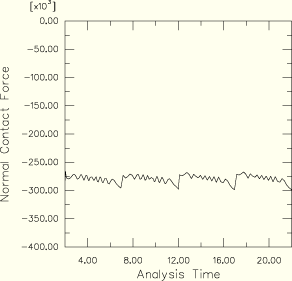
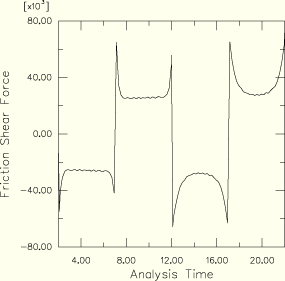
Figure 3.2.13–5 shows the time history of the total normal force along the interface between the compound and the rod for the static step. The coarse master surface mesh is responsible for the oscillations in the curve. Figure 3.2.13–6 shows the time history of the frictional shear forces that develop along this interface. The exponential form of the friction model is apparent as the slider completes one cycle of the harmonic motion. During this cycle the slip rate varies according to ![]() . The slider starts at the top. At 5 seconds the slider reaches the bottom, the velocity of the slider is zero, and the slider goes from “slip” to “stick.” It reverses its direction and slips again. At 10 seconds the slider is back at the top. This motion is repeated for the static analysis.
. The slider starts at the top. At 5 seconds the slider reaches the bottom, the velocity of the slider is zero, and the slider goes from “slip” to “stick.” It reverses its direction and slips again. At 10 seconds the slider is back at the top. This motion is repeated for the static analysis.
Axisymmetric model with the exponential decay friction model.
Axisymmetric model with the Coulomb friction model.
Three-dimensional model with the exponential decay friction model.
Three-dimensional model with the Coulomb friction model.