Products: ABAQUS/Standard ABAQUS/Explicit
This problem is chosen to provide verification and illustration of the axisymmetric shell elements in ABAQUS. Most of the response is localized, so the case represents a more severe test than, for example, a sphere with internal pressure. Koiter (1963) has provided an analytical solution, which has been used as a standard test for several axisymmetric shell finite elements (see Ashwell and Gallagher, 1976).
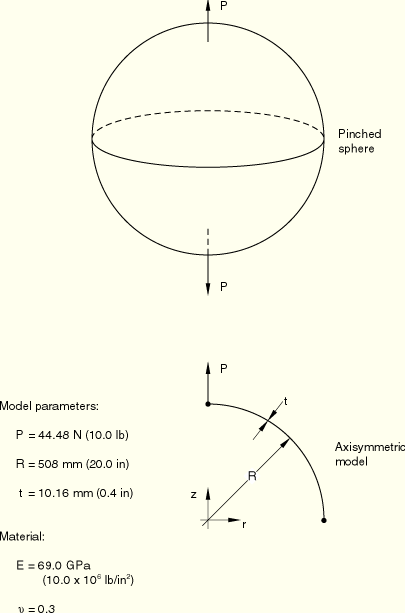
The physical problem consists of a hollow sphere with opposing point loads acting along a diameter of the sphere (see Figure 2.3.3–1). Taking advantage of symmetry in the model, only one-half of the sphere is modeled. The meshes used for this example are uniform, although in an actual problem that exhibits such localized response the mesh should be refined to concentrate the elements in the region where the strain gradients are most severe. Four axisymmetric meshes are used for the ABAQUS/Standard analysis. For the linear 2-node element, SAX1, the meshes have 10 and 20 elements. For the quadratic 3-node element, SAX2, the meshes have 5 and 10 elements. Two three-dimensional models made up of a single strip of shell or continuum shell elements that subtend an arc of 6° in the circumferential direction are also tested in ABAQUS/Standard. Two SAX1 meshes are used for the ABAQUS/Explicit analysis, one with 10 elements and the other with 20 elements.
In the ABAQUS/Explicit analysis the quasi-static pinching load is applied as a ramp function during the initial 10% of the time period for the step and is then held constant for the remainder of the step. Additionally, viscous pressure loading is applied to the structure to damp out dynamic effects. The time period for the step and the viscous pressure are chosen to obtain an optimal static solution.
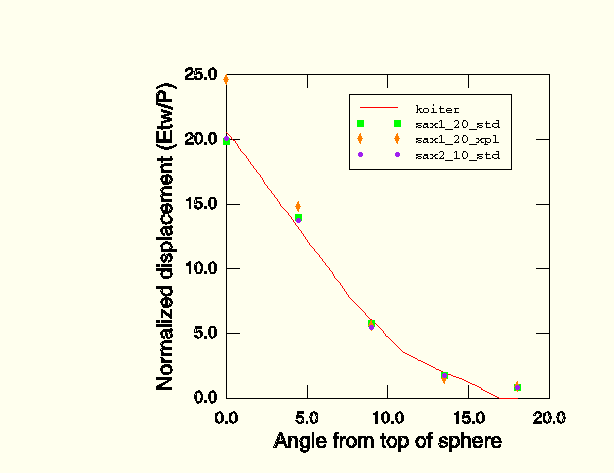
Figure 2.3.3–2 shows the numerical predictions of radial displacement compared with Koiter's (1963) exact solution. The radial displacement falls off very quickly and is essentially zero at angles more than 15° from the top of the sphere. In the coarser meshes of linear elements (SAX1) each element subtends a 9° arc; each quadratic element in the coarser mesh subtends 18°. Thus, the models are rather coarse compared to the variation of the exact solution.
Nonlinear geometric effects in this problem can be ignored because the displacements and rotations are small. By default, ABAQUS/Explicit accounts for all geometric nonlinearities. The default can be overridden by setting the parameter NLGEOM=NO on the *STEP option. The results for this problem are independent of the value of the NLGEOM parameter, which demonstrates that the small-displacement and the large-displacement deformation theories correctly converge to the same results when the strains and rotations are small. The advantage of using the small-displacement deformation theory in ABAQUS/Explicit is a significant reduction in CPU time (often about 30%) for analyses that are dominated by element calculations.
The results for each of the meshes are summarized in Table 2.3.3–1, where the displacement at the pole of the shell is used as a representative measure of the solutions. The table indicates that the quadratic element meshes converge more rapidly than the linear element meshes with the same number of nodes. This is a common observation and reflects the higher theoretical convergence rate, with respect to element size, that is available with higher-order interpolation.
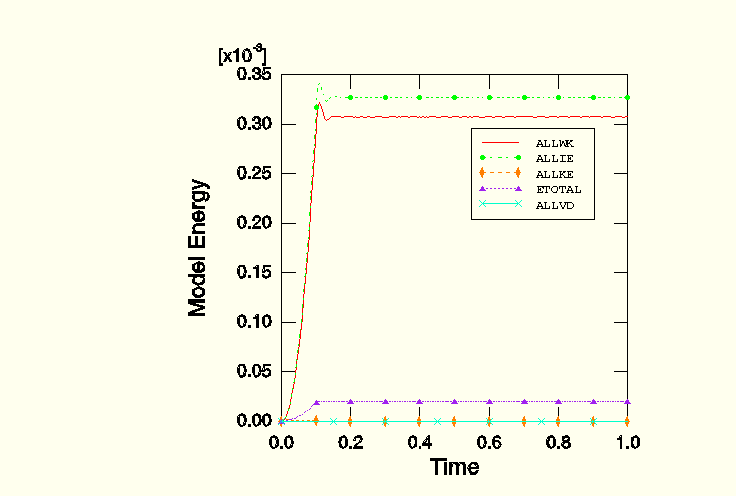
The explicit dynamic analysis is run until a steady, static solution is obtained. Figure 2.3.3–3 shows an energy balance plot for the 20-element mesh. It can be seen that inertia effects are damped out very quickly.
S4R, 20-element model.
SC8R, 20-element model.
SC8R, 20-element model with enhanced hourglass control.
SAX1, 10-element model.
SAX1, 20-element model.
SAX2, 5-element model.
SAX2, 10-element model.
10-element model, large-displacement analysis.
20-element model, large-displacement analysis.
10-element model, small-displacement analysis.
20-element model, small-displacement analysis.
Ashwell, D. G., and R. H. Gallagher, Editors, Finite Elements for Thin Shells and Curved Members, John Wiley and Sons, London, 1976.
Koiter, W. T., “A Spherical Shell Under Point Loads at Its Poles,” Progress in Applied Mechanics: The Prager Anniversary Volume, Macmillan, New York, 1963.
Table 2.3.3–1 Displacement at top of sphere.
| Element | Number of elements | Normalized displacement | Error |
|---|---|---|---|
| type | |||
| SAX1, ABAQUS/Standard | 10 | 15.52 | –24.7% |
| SAX1, ABAQUS/Standard | 20 | 19.85 | –3.5% |
| SAX1, ABAQUS/Explicit | 10 | 24.77 | –20.2% |
| SAX1, ABAQUS/Explicit | 20 | 24.63 | –19.6% |
| SAX2 | 5 | 15.62 | –24% |
| SAX2 | 10 | 20.12 | –2.2% |
| S4R | 20 | 19.80 | –3.9% |
| SC8R | 20 | 19.83 | –3.7% |
| SC8R* | 20 | 19.94 | –3.2% |
| The normalized displacement is | |||
| Koiter's (1963) exact solution gives a normalized displacement of 20.6. | |||
| *ABAQUS/Standard results with enhanced hourglass control. | |||