Product: ABAQUS/Standard
Substructures provide significant savings in computer time in certain cases. They can be used in a linear analysis to divide a problem into several smaller analyses or to save parts of the structure that are not modified every time the analysis is done. Substructures can also be useful in a nonlinear analysis. As demonstrated in “The Hertz contact problem,” Section 1.1.11, if any part of the structure remains linear during the analysis, the stiffness of that part can be calculated once and saved. Substructures can also be used in the analysis of linear perturbations around a state reached as a result of nonlinear response, as shown in “Vibration of a rotating cantilever plate,” Section 1.4.7, where the vibration frequencies are calculated for a prestressed structure.
The purpose of this example is to provide basic demonstration and verification of the substructuring capabilities in ABAQUS.
The example is a frame consisting of two columns connected by a beam (Figure 1.16.1–1). The columns and the beam are each modeled with 10 elements of type B21. The frame is loaded by a distributed load applied on the beam.
Once a substructure has been generated, it can be used just as any other element in an analysis. The substructure is connected to the rest of the model through specified degrees of freedom (the retained degrees of freedom). During substructure generation it is also possible to define load cases for the substructure. These load cases can then be scaled and applied during the analysis. In this example the loading on the beam is defined as a substructure load case and then applied at the global level.
Many structures include parts with the same geometry. In such cases the part can be generated as a single substructure that is then used several times. In this case the two columns are identical, so a substructure can be formed once for the column geometry and then used twice.
The analysis includes two steps. The first is a static load case in which the distributed load is applied to the structure. For this step the substructure analysis gives the same solution that is obtained by using the model without substructures, since the static reduction to a substructure stiffness matrix does not change that matrix.
In the second step a frequency analysis is performed to extract the first few vibrational modes of the structure. The technique of generating a substructure so that its dynamic response is modeled with reasonable accuracy is called “Component Mode Synthesis.” In this approach the dynamic response of the substructure is made up from a combination of its static modes of deformation and some of its natural modes of vibration obtained with its retained degrees of freedom fully constrained. In the case of a substructure with many internal degrees of freedom it may be expensive to extract these internal modes of vibration. In that case a sufficiently accurate dynamic representation of the substructure can often be obtained by “Guyan reduction.” This means that additional degrees of freedom that are not needed for the physical connection of the substructure to the rest of the mesh are retained simply to improve the dynamic modeling. The drawback to this method is that a judicious choice of these degrees of freedom is necessary to get the most benefit from the larger size of the substructure matrix. Component mode synthesis is, thus, a more reliable alternative but requires a *FREQUENCY analysis of the substructure, which can be expensive for a large model. The modes are obtained by extracting some of the eigenfrequencies of the substructure in a *FREQUENCY step, with all of the retained degrees of freedom restrained with the *BOUNDARY option. The n modes to be used in the substructure generation are then specified using the *RETAINED EIGENMODES option, with n not greater than the number of modes that have been extracted. These extra modes are then added when the substructure is used in the global analysis. In general, this technique improves the representation of the substructure's dynamic behavior significantly, even with just a few additional modes. In this example we have added two extra modes in each of the substructures. substrframe_1level_2mode_gen1.inp and substrframe_1level_2mode_gen2.inp show the input data when extra dynamic modes are added.
Substructures can be used within substructures. We illustrate this capability by dividing each column into two identical parts. A substructure is then generated for the half-column, and a higher-level substructure is then generated for the full column by combining two substructures on the lowest level. The same process is followed for the beam. In this way a total of nine substructures are used to model the structure, although the repetitive structure requires very little calculation. ABAQUS places no limit on the number of levels of substructures that can be used. substrframe_2level_gen1.inp, substrframe_2level_gen2.inp, substrframe_2level_gen3.inp, and substrframe_2level_gen4.inp show the input data for this example with two levels of substructures.
By default, ABAQUS will write the substructures to a file whose name is defined by the job name. It is also possible to define the library name on the *SUBSTRUCTURE GENERATE and *ELEMENT options. The contents of a substructure library can be listed by using the *SUBSTRUCTURE DIRECTORY option. It is also possible to copy substructures from one file to another using the *SUBSTRUCTURE COPY option. substrframe_substrdirect.inp shows the use of these options.
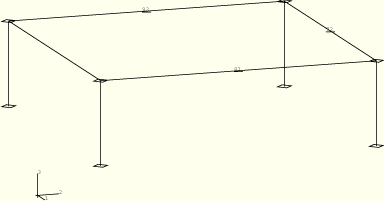
Substructure stiffness and mass matrices are created based on the location and orientation of the elements when the substructure is generated. These matrices can be used anywhere in space as long as they are only translated. If the substructure is needed in a rotated configuration, the matrices must be transformed. Rotation and mirroring of a substructure is defined on the *SUBSTRUCTURE PROPERTY option. The example illustrates this option with the three-dimensional frame structure shown in Figure 1.16.1–2. Element 82 on the usage level has been created by rotating substructure Z201 by 90°. Element 81 on the usage level has been created by mirroring substructure Z201 through the plane ![]() . Element 72 on the global level could have been created by a simple translation of substructure Z201 but has instead been created by both a rotation and a mirroring of the substructure. substrframe_b31_gen1.inp and substrframe_b31_gen2.inp show the input data for this analysis.
. Element 72 on the global level could have been created by a simple translation of substructure Z201 but has instead been created by both a rotation and a mirroring of the substructure. substrframe_b31_gen1.inp and substrframe_b31_gen2.inp show the input data for this analysis.
The analysis without substructures provides “correct” results for this example (that is, the results are correct for the finite element discretization used). For the static loading case, substructure analysis does not imply any approximation; and the results with substructures are, therefore, identical. For the *FREQUENCY analysis the substructure mass matrix is an approximate representation, so some accuracy is lost. Table 1.16.1–1 and Table 1.16.1–2 show comparisons of the lowest frequencies estimated by the planar and three-dimensional models, respectively. They show the significant improvement in results that is obtained by including extra modes using the *RETAINED EIGENMODES option.
One level of substructures and two dynamic modes added for each substructure.
Substructure generation referenced by the analysis substrframe_1level_2modes.inp.
Substructure generation referenced by the analysis substrframe_1level_2modes.inp.
Two levels of substructures.
Substructure generation referenced by the analysis substrframe_2level.inp.
Substructure generation referenced by the analysis substrframe_2level.inp.
Substructure generation referenced by the analysis substrframe_2level.inp.
Substructure generation referenced by the analysis substrframe_2level.inp.
Shows the use of *SUBSTRUCTURE DIRECTORY and the consolidation of the three substructure files from substrframe_2level.inp into two substructure files.
Analysis of the three-dimensional frame structure using substructures. In this case element 82 is created by a rotation, element 81 by mirroring in the plane ![]() , and element 72 by rotation followed by mirroring.
, and element 72 by rotation followed by mirroring.
Substructure generation referenced by the analysis substrframe_b31.inp.
Substructure generation referenced by the analysis substrframe_b31.inp.
Analysis without substructures.
Analysis with one level of substructures.
Substructure generation referenced by the analysis substrframe_1level.inp.
Shows the use of the two substructure files generated in substrframe_substrdirect.inp in redoing the global analysis of the frame.
Analysis of the three-dimensional frame structure without substructures.
Analysis of the three-dimensional frame structure using substructures. The two structures in the ![]() -direction have been created by rotating substructure Z201 by 90° about the
-direction have been created by rotating substructure Z201 by 90° about the ![]() -axis.
-axis.
Substructure generation referenced by the analysis substrframe_rotz201.inp.
Substructure generation referenced by the analysis substrframe_rotz201.inp.
Same as substrframe_rotz201.inp with two extra dynamic modes added for each substructure.
Substructure generation referenced by the analysis substrframe_rotz201_2modes.inp.
Substructure generation referenced by the analysis substrframe_rotz201_2modes.inp.
Table 1.16.1–1 Frequencies of the first three modes, planar model (all frequencies in cycles/time).
| Mode 1 | Mode 2 | Mode 3 | |
|---|---|---|---|
| Without substructures | 7.0176 | 7.2431 | 20.309 |
| Three substructures | 7.2609 | 11.640 | 33.291 |
| Error | 3.5% | 61% | 64% |
| Three substructures, with two dynamic modes | 7.0173 | 7.2444 | 20.314 |
| Error | 0.004% | 0.004% | 0.004% |
| Two levels of | 7.2609 | 11.640 | 33.291 |
| substructures | |||
| Error | 3.5% | 61% | 64% |
Table 1.16.1–2 Frequencies of the first three modes, three-dimensional model (all frequencies in cycles/time).
| Mode 1 | Mode 2 | Mode 3 | |
|---|---|---|---|
| Without substructures | 4.6277 | 4.6277 | 4.6320 |
| Eight substructures | 5.0416 | 5.0416 | 5.4384 |
| Error | 8.9% | 8.9% | 17.4% |
| Eight substructures, with two dynamic modes | 4.6301 | 4.6301 | 4.6321 |
| Error | 0.05% | 0.05% | 0.05% |