Product: ABAQUS/Explicit
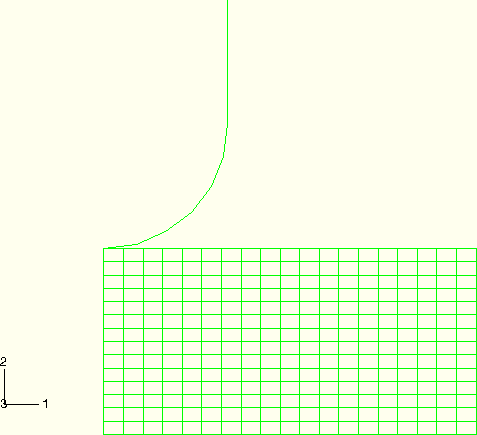
The finite element model for the problem is axisymmetric, as shown in Figure 1.11.1–1. The model consists of a rigid punch and a deformable blank. The blank, which is meshed with CAX4R elements, has a radius of 600 mm and a height of 300 mm. The punch is modeled as an analytical rigid surface using the *SURFACE, TYPE=SEGMENTS option in conjunction with the *RIGID BODY option. Coulomb friction is modeled between the punch and the blank with a friction coefficient of 0.1. Symmetry boundary conditions are defined at ![]() =0 for the blank. The bottom of the blank is also fully constrained.
=0 for the blank. The bottom of the blank is also fully constrained.
Several analyses are performed using the following material models for the blank: hyperelasticity, hyperelasticity with viscoelasticity, hyperfoam, Hill plasticity, Mises plasticity, rate-dependent Mises plasticity, Drucker-Prager plasticity, Drucker-Prager cap plasticity, crushable foam plasticity, and porous metal plasticity. The parameters and constants used for each material model can be found in the input files that are included with the ABAQUS release. The punch is fully constrained except in the vertical direction, in which motion is prescribed such that the maximum indentation depth is 250 mm. The blank is indented dynamically when it is modeled with a rate-dependent material (hyperelasticity with viscoelasticity or rate-dependent Mises plasticity). A ramped velocity profile is prescribed such that the maximum velocity is 2000 mm/sec. The blank is indented quasi-statically when it is modeled with the remaining (rate-independent) material models. The SMOOTH STEP value on the *AMPLITUDE, DEFINITION option is used to specify the displacement of the punch and promote a quasi-static solution.
A single adaptive mesh domain that incorporates the entire blank is used. The symmetry boundary conditions are defined as Lagrangian boundary regions (the default), and contact surfaces are defined as sliding boundary regions (the default). Nondefault values for the FREQUENCY and MESH SWEEPS parameters on the *ADAPTIVE MESH option are used for some materials to account for the large amount of localized deformation that occurs immediately under the punch. These values are chosen to solve the problem economically yet retain a good mesh throughout the simulation.
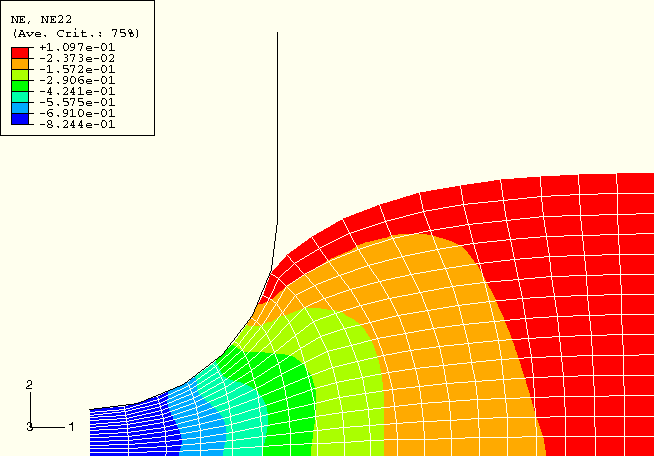
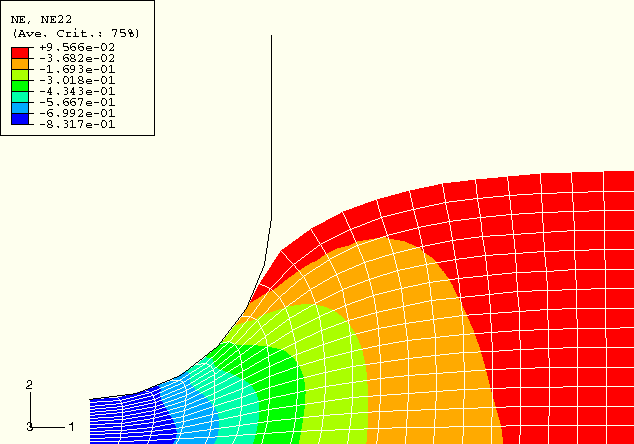
With the exception of the hyperfoam material, an indentation of this depth cannot be simulated using a pure Lagrangian simulation. The crushable foam material can be indented a majority of this depth using a pure Lagrangian approach. For each of the materials continuous adaptive meshing maintains the quality of the mesh throughout the analysis, and contours of key variables appear to be reasonable. For the hyperfoam material comparisons of the results from the adaptive mesh simulation and a pure Lagrangian simulation can be made. Figure 1.11.1–2 and Figure 1.11.1–3 show contours of the y-component of nominal strain in the blank after punching using the adaptive mesh and pure Lagrangian approaches, respectively. The results are in good agreement.
Mises plasticity.
Hyperelasticity.
Hyperelasticity with viscoelasticity.
Hyperfoam.
Crushable foam plasticity with volumetric hardening.
Crushable foam plasticity with isotropic hardening.
Porous plasticity.
Hill plasticity.
Drucker-Prager plasticity.
Drucker-Prager cap plasticity.
Mises plasticity with rate dependence.
Pure Lagrangian analysis of the hyperfoam model.