Eye Tracking for ALS Patients
Contents
Eye Tracking-Project: Image Selection and Compression
This project is tackling the Image Processing component of the CubeSat project. In particular, dealing with selection of valuable of image data and the effective compression of that image data.
The Project
Project Timeline: Download
Project Poster: File:UGR cubsat2 poster SP11.ppt
Project abstract
The goal of this project is to examine the performance of different lossless compression algorithms and determine which one would be the most suitable for a cubeSat based communication system. As the cubeSat based communication system has both high data collection potential and relatively low data transmission throughput, optimal compression is a key performance bottleneck for the overall system performance. We select an optimal subset of the images that are generated using the IR camera mounted on a cubeSat and compress these subset of images. The compression algorithms we investigated and tested are run-length encoding, difference encoding, and Huffman coding. Initially, we implement these algorithms in MATLAB. Later, we will use the datasets developed in the first part of the cubeSat project.
Background
This research was conducted by Sana Naghipour and Saba Naghipour in the Fall 2011 Semester at Washington University in Saint Louis. It was part of the Undergraduate Research Program and taken for credit as the course ESE 497 under the Electrical and Systems Engineering Department. The project was overseen by Dr. Arye Nehorai,Ed Richter and Phani Chavali.
project overview
The Eye tracker project is a research effort to empower people, who are suffering from Amyotrophic Lateral Sclerosis (ALS), to write using their eyes by tracking the movement of the pupil. The project will be implemented in two main phases: First Phase: development of the software for pupil tracking Second Phase: building the hardware necessary to capture the images of the eye and transfer the images to a processing unit.
source code (zipped)-File:Cubesat compression source SP11.zip
note- the code is decently commented, however it may be a bit confusing. So, for simplicity one should run the script called "Compression test" this script should prompt the user for a image to process and then, given a valid filename perform an array of compression tests. After finishing it should display the results of the operations graphically.
System Setup
We use Lab view to capture the video using an infrared camera. There is support for recording of videos with several frame rates, and formats. After obtaining the video, we perform sequential frame by frame processing.


Tracking
In this part we used different methods that helped us overcome the challenges we faced during the project. The technics we used are:
Discarding Color information: We convert the images from all the frames into to their corresponding gray scale images. To do this, we average the pixel values in the entire three color channel to obtain a gray scale image.
Low pass filtering:
We use low-pass filtering to remove the sharp edges in each image. This also helps to remove the undesired background light in the image.



Scaling: We scale down the filtered images to obtain lower resolution images. This serves two purposes. First, since the dimension of the image decreases, scaling improves the processing time. Second, the averaging effect removes the undesired background light.
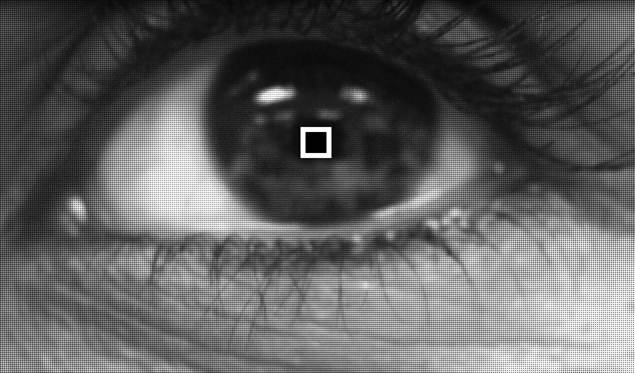
Template Matching: We used a template matching algorithm to segment the darkest region of the image. Since after discarding the color information and, low-pass filtering, the pupil corresponds to the darkest spot in the eye, this method was used. We used a small patch of dark pixels as a template. The matching is done using exhaustive search over the entire image. Once a match is found, the centroid of the block was determined to the pupil location. For the experiments, we used a block size of 5 x 5 pixels.
Determining the search space: Since the exhaustive search over the entire image to find a match is computationally intensive, we propose an adaptive search method. Using this method, we choose the search space based on the pupil location from earlier frame. In this manner, using the past information, we were able to greatly reduce the complexity of the search. We used a search space of 75 X 75 pixels around the pupil location from the last frame.
Results




{kind=link}
Conclusion & Future work
An algorithm for estimating the position and the movement of the pupil is implemented using a template matching method. In the future, we will build the necessary hardware that uses the algorithm for prosthetic limb control.