Difference between revisions of "Accostic Source Location"
From ESE497 Wiki
Jump to navigationJump to search (Created page with '* Topic 1: Acoustic Source Location Background and Theory (Slides 1-19) ** Additional references: ***[http://ese.wustl.edu/Con…') |
|||
| (One intermediate revision by the same user not shown) | |||
| Line 1: | Line 1: | ||
| − | * | + | * [[media:Presentation_Robotic_Microphone_Array.pdf|Acoustic Source Location Background and Theory]] (Slides 1-19) |
** Additional references: | ** Additional references: | ||
***[http://ese.wustl.edu/ContentFiles/Research/UndergraduateResearch/CompletedProjects/WebPages/fl08/JoshuaYork/index.html Joshua York, Acoustic Source Localization, ESE497, Fall 2008] | ***[http://ese.wustl.edu/ContentFiles/Research/UndergraduateResearch/CompletedProjects/WebPages/fl08/JoshuaYork/index.html Joshua York, Acoustic Source Localization, ESE497, Fall 2008] | ||
| Line 6: | Line 6: | ||
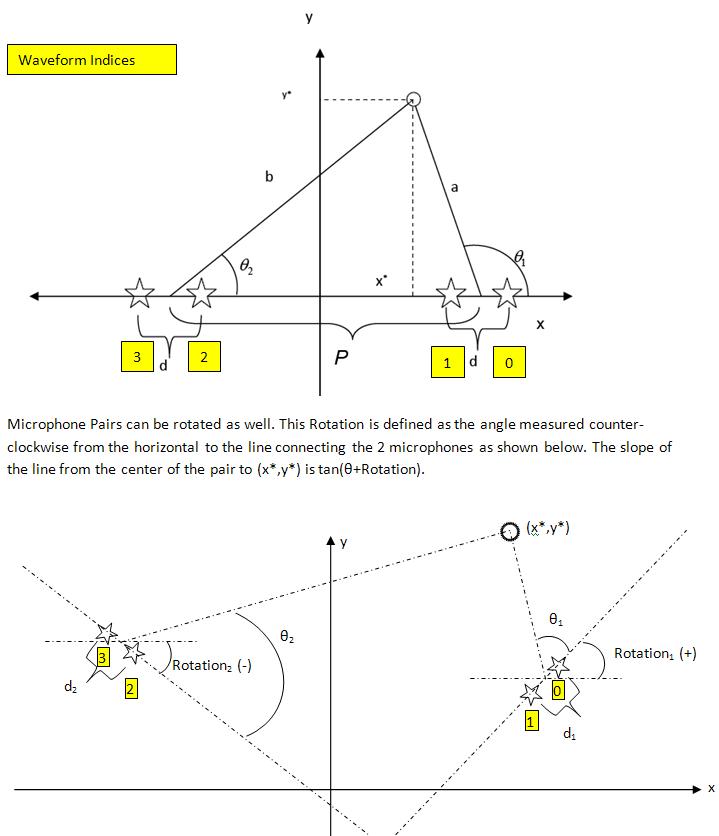
** Homework 2: Using this [[media:MicrophoneArrayWithRotation.JPG|figure]], derive the general equations for the source location (x*,y*) which include the rotation of both pair, i.e., the intersection of the 2 lines. Verify that the formula on slide 10 of the lecture notes is correct for the special case where | ** Homework 2: Using this [[media:MicrophoneArrayWithRotation.JPG|figure]], derive the general equations for the source location (x*,y*) which include the rotation of both pair, i.e., the intersection of the 2 lines. Verify that the formula on slide 10 of the lecture notes is correct for the special case where | ||
***y1 = y2 = 0 | ***y1 = y2 = 0 | ||
| − | ***Rotation1 and | + | ***Rotation1 and Rotation2 = 0 |
***X1=P/2 | ***X1=P/2 | ||
***X2 = -P/2 | ***X2 = -P/2 | ||
Latest revision as of 14:59, 11 September 2013
- Acoustic Source Location Background and Theory (Slides 1-19)
- Additional references:
- Homework 1: Read the material that we discussed in our meeting today and the additional references listed above.
- Homework 2: Using this figure, derive the general equations for the source location (x*,y*) which include the rotation of both pair, i.e., the intersection of the 2 lines. Verify that the formula on slide 10 of the lecture notes is correct for the special case where
- y1 = y2 = 0
- Rotation1 and Rotation2 = 0
- X1=P/2
- X2 = -P/2
{kind=link}