Difference between revisions of "Cheers! Weekly Log"
Jessieshi97 (talk | contribs) |
m (Protected "Cheers! Weekly Log" ([Edit=Allow only administrators] (indefinite) [Move=Allow only administrators] (indefinite))) |
||
| (54 intermediate revisions by 2 users not shown) | |||
| Line 20: | Line 20: | ||
#* Added the wooden cover idea to the proposal to separate the mechanical system from the electrical system. The mechanical system will be built on top of the electrical system and the wires to connect to the weight sensor is through the base (will not be out in air). | #* Added the wooden cover idea to the proposal to separate the mechanical system from the electrical system. The mechanical system will be built on top of the electrical system and the wires to connect to the weight sensor is through the base (will not be out in air). | ||
#* Researched various ways of supplying power to the servo motor, whether is it through the Arduino board portal, using two separate power supplies or connecting the Arduino board and the two motor in parallel or series, etc. We decided to use a single power supply and connecting the two motors and Arduino board all parallel to each other. The power supply would be 6V 3A wall power adaptor. The two motors can operate at the voltage of 4.8V to 6V(correspond to maximum stall torque) and the Arduino board can operate at a minimum of 6V. As we will not need the Arduino board to supply a lot of power (push button and weight sensor), we thought it should be fine. | #* Researched various ways of supplying power to the servo motor, whether is it through the Arduino board portal, using two separate power supplies or connecting the Arduino board and the two motor in parallel or series, etc. We decided to use a single power supply and connecting the two motors and Arduino board all parallel to each other. The power supply would be 6V 3A wall power adaptor. The two motors can operate at the voltage of 4.8V to 6V(correspond to maximum stall torque) and the Arduino board can operate at a minimum of 6V. As we will not need the Arduino board to supply a lot of power (push button and weight sensor), we thought it should be fine. | ||
| − | |||
# Mechanical System | # Mechanical System | ||
#* Started building the model the part 1 of the base and learned to use the Ultimaker 2 Extended machine with Natalie and Nathan over the weekend. | #* Started building the model the part 1 of the base and learned to use the Ultimaker 2 Extended machine with Natalie and Nathan over the weekend. | ||
| Line 30: | Line 29: | ||
==Week 5 (2/20-2/26) == | ==Week 5 (2/20-2/26) == | ||
| − | |||
# Proposal | # Proposal | ||
#* Went to Home Depot found a U-bolt that could serve as the bottle holder so that it can tilt more than 90 degrees. | #* Went to Home Depot found a U-bolt that could serve as the bottle holder so that it can tilt more than 90 degrees. | ||
#* Ordered the pulleys. | #* Ordered the pulleys. | ||
| − | |||
#Mechanical System: | #Mechanical System: | ||
#* Adjusted the part 1 base so that the attachment part to part 2 of the base will not interfere with the swing. The nut hole in base 1 was also adjusted. | #* Adjusted the part 1 base so that the attachment part to part 2 of the base will not interfere with the swing. The nut hole in base 1 was also adjusted. | ||
#* Calculated exact parameters needed and designed part 2 of the base, the horizontal rotating axis. | #* Calculated exact parameters needed and designed part 2 of the base, the horizontal rotating axis. | ||
| − | #* Built the 3D model for base 2 and horizontal rotation axis | + | #* Built the 3D model for base 2 and horizontal rotation axis. |
#* Start printing out an initial model for base 2 and horizontal axis. | #* Start printing out an initial model for base 2 and horizontal axis. | ||
#* Had a rough sketch of the model for the bottle holder and the lever arm and how it will be attached to the horizontal arm. | #* Had a rough sketch of the model for the bottle holder and the lever arm and how it will be attached to the horizontal arm. | ||
| Line 47: | Line 44: | ||
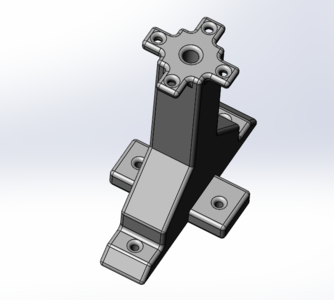
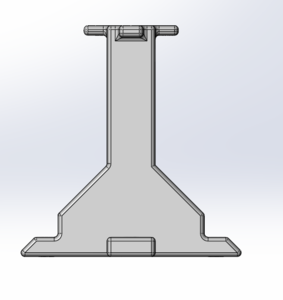
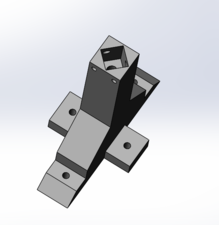
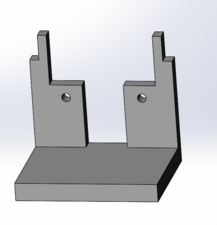
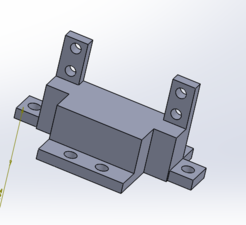
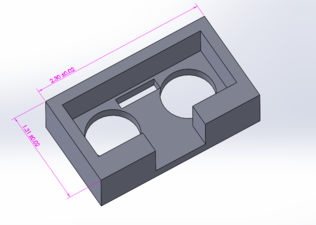
File:Cpic3.PNG| Base 2 (will be put on top of base 1) | File:Cpic3.PNG| Base 2 (will be put on top of base 1) | ||
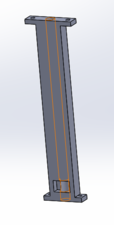
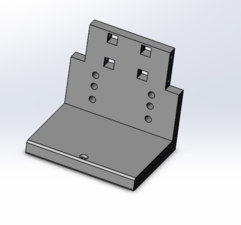
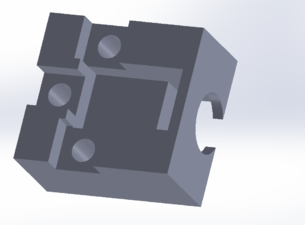
File:Cpic6.PNG| Horizontal Rotation Axis | File:Cpic6.PNG| Horizontal Rotation Axis | ||
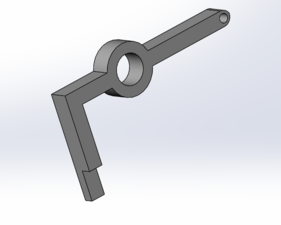
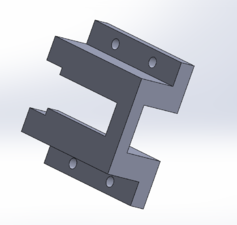
| − | File:Cpic4.PNG| Bottle | + | File:Cpic4.PNG| Bottle holder |
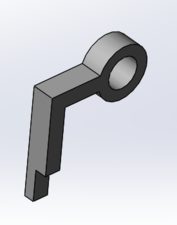
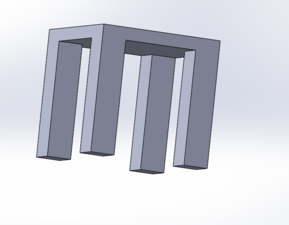
| − | File:Cpic5.PNG| Bottle | + | File:Cpic5.PNG| Bottle swing |
</gallery> | </gallery> | ||
| − | == Week 6 (2/27-3/5)== | + | == Week 6 (2/27-3/5) First Evaluation == |
| − | + | [[File:Cheers New.jpeg|thumb|Picture of System|400px]] | |
# Proposal | # Proposal | ||
#* Decided to put the electrical system on top of the mechanical system with a wooden stage, then the fishing line from the motor will be pulling from the bottom of the bottle. | #* Decided to put the electrical system on top of the mechanical system with a wooden stage, then the fishing line from the motor will be pulling from the bottom of the bottle. | ||
#* Decided to not let the glassware tilt but keep in on the table. This would make the weight sensor be more accurate in estimating the amount of soda in glassware. (as we will not be dealing with component forces of the weight of glassware with soda). | #* Decided to not let the glassware tilt but keep in on the table. This would make the weight sensor be more accurate in estimating the amount of soda in glassware. (as we will not be dealing with component forces of the weight of glassware with soda). | ||
| + | # Mechanical System | ||
| + | #* Adjusted hole parameters on base 2 so that it could fit with base 1 and horizontal axis better. | ||
| + | #* Redesigned the bottle holder and the swing so for the adjusted proposal. | ||
| + | #* Printed out two base 2s and assembled the initial mechanism system without the bottle holder. | ||
| + | <gallery mode=packed heights=150px style="text-align:left"> | ||
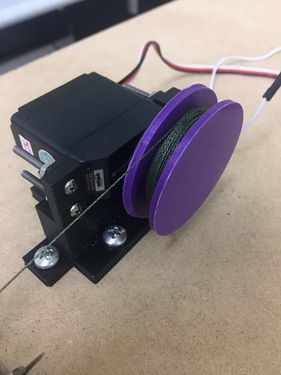
| + | File:Cpic8.PNG | Bottle Swing edited | ||
| + | </gallery> | ||
| + | == Week 7 (3/6-3/12)== | ||
| + | [[File:Cpic10.jpeg|thumb|Picture of System|300px]] | ||
| + | # Proposal | ||
| + | #* Ordered all parts. | ||
| + | #* Had a new picture representing the system (right) with target dimensions of the wooden frame. | ||
| + | #* Added the support system for the bottle so that the motor do not have to withstand a large amount of torque while the bottle is at rest (position 1). | ||
| + | # Mechanical System | ||
| + | #* Deleted the 45 degree angle to hold the bottle as it has a high chance of fracture. | ||
| + | #* Modified the bottle holder so that the fish lines would connect directly to the bottle holder base. | ||
| + | #* Printed the bottle base edition 2 and assembled the mechanical design. (picture shown below) | ||
| + | # Electrical System | ||
| + | #* Learned about Arduino board and breadboard. | ||
| + | #* Followed a simple tutorial to control an LED with toggle switches. | ||
| + | |||
| + | <gallery mode=packed heights=250px style="text-align:left"> | ||
| + | File:Cpic11.png | | ||
| + | File:Cpic12.jpeg | | ||
| + | </gallery> | ||
| + | == Week 8 (3/13-3/19) Spring Break == | ||
# Mechanical System | # Mechanical System | ||
| − | #* | + | #* Designed the specific dimensions of the support system for the bottle. |
| − | #* Redesigned the bottle holder and | + | #* Went to HomeDepot and decided to use the wood from there instead of the provided one from machine shop. |
| − | #* Printed out two base 2 and | + | # Electrical System |
| + | #* Learned how to control the motor (turning at different directions and different speeds) using Arduino. | ||
| + | |||
| + | == Week 9 (3/20-3/26) == | ||
| + | |||
| + | #Mechanical System | ||
| + | #* Redesigned the bottle holder and swing so that it will be more stable and accommodate for two pair of holes for the two U bolts. | ||
| + | #* Printed out the bottle holder and swing. (picture shown below with only 1 U bolt used) | ||
| + | #* Decided to use two U bolts to keep the bottle in place better. | ||
| + | #* Resigned the motor holder and printed it out. | ||
| + | #* Designed the lower half of the IR distance sensor suspension system and printed out. | ||
| + | # Electrical System | ||
| + | #* Learned how to control the IR sensor using Arduino by following the link [http://bildr.org/2011/03/various-proximity-sensors-arduino/ here]. | ||
| + | #* Started Algorithm design of drawing a flowchart. | ||
| + | [[File:Cgif1.gif]] | ||
| + | <gallery mode=packed heights=150px style="text-align:left"> | ||
| + | File:Cpic14.png | Lower half of distance sensor suspension system | ||
| + | File:Cpic15.png | Motor holder | ||
| + | File:Cpic16.png | Bottle holder base | ||
| + | File:Cpic30.PNG | Bottle holder swing | ||
| + | </gallery> | ||
| + | |||
| + | == Week 10 (3/27-4/2) == | ||
| + | [[File:CIRCalibration.png|thumb|Calibration Curve for IR Infrared Sensor|300px]] | ||
| + | #Mechanical System | ||
| + | #* Bought wood from HomeDepot to make the wooden frame. | ||
| + | #* Drilled holes and cut a piece off from the one of the wood to make room for pulley (took us total of 7 hours). | ||
| + | #* Designed the spool to affix on the accessory on the servo motor. | ||
| + | #* Designed the upper half of the IR distance sensor suspension system after have exact dimensions of the wooden frame. | ||
| + | #Electrical System | ||
| + | #* We calibrated the infrared distance sensor and generated a curve (shown on the right). We got a best fit line that translates to distance = 12293*(AnalogRead)^-1.148. | ||
| + | #* Adjusted the algorithm flow chart. | ||
| + | #* Write code to use the IR distance sensor as sensor and control the rotating speed of the servo motor. | ||
| + | <gallery mode=packed heights=250px style="text-align:left"> | ||
| + | File:Cpic19.png | Upper half of distance sensor suspension system | ||
| + | </gallery> | ||
| + | |||
| + | == Week 11 (4/3-4/9) Second Evaluation == | ||
| + | #Proposal | ||
| + | #*After the second evaluation, we decided to try out the ultrasonic sensor and it was giving more stable outputs when dealing with liquid so we decided to switch the IR distance sensor to ultrasonic distance sensor. | ||
| + | #Mechanical System | ||
| + | #* Printed the spool and attached it to the servo motor. | ||
| + | #* Designed and printed pulley stabilizer. | ||
| + | #* Assembled the printed parts onto the wooden frame. | ||
| + | #Electrical System | ||
| + | #* Assembled the motor and IR distance sensor onto the wooden frame. | ||
| + | #* Learned how to use the ultrasonic sensor and experimented with it. | ||
| + | #Experiments | ||
| + | #* Conducted experiment to test if the IR distance sensor is correctly measuring its distance to the liquid level distance. | ||
| + | #* Conducted experiments to use the motor to tilt an empty coca cola bottle to an angle more than 90 degrees to the horizontal at varying speed and going back to its original position. | ||
| + | #* Put the toggle switch, ultrasonic sensor and motor in one system. | ||
| + | <gallery mode=packed heights=250px style="text-align:left"> | ||
| + | File:14.jpeg | spool | ||
| + | </gallery> | ||
| + | |||
| + | ==Week 12 (4/10-4/16) == | ||
| + | # Proposal | ||
| + | #* Ordered a lifting platform in order to accommodate various glassware heights. | ||
| + | # Mechanical System | ||
| + | #* Designed Ultrasonic distance sensor holder. | ||
| + | #* Redesigned and printed a pulley holder as the previous stabilizer was not good enough that the fishing line keeps falling off the pulleys. | ||
| + | #* Redesigned Ultrasonic distance sensor suspension system. | ||
| + | # Electrical System | ||
| + | #* Measured the specific fast and low speed setting on the motor. | ||
| + | #* Write code for the entire system, found [https://bitbucket.org/jessieshi97/cheers/ here]. | ||
| + | # Experiments | ||
| + | #*Run the whole system, change some number setting in Arduino (speed of motor and delay times in distance sensor) and find set of values that work for out system. | ||
| + | # Demo | ||
| + | #* Start design poster. | ||
| + | <gallery mode=packed heights=150px style="text-align:left"> | ||
| + | File:Pulley h.PNG |Pulley stabilizer | ||
| + | File:Sensor holder.PNG | Ultrasonic distance sensor holder | ||
| + | </gallery> | ||
| + | ==Week 13 (4/17-4/24) == | ||
| + | # Mechanical System | ||
| + | #* Printed Ultrasonic distance sensor holder. | ||
| + | #* Printed the glassware base to accommodate for the lifting platform. | ||
| + | #* Printed Ultrasonic distance sensor suspension system. | ||
| + | #* Designed and printed lifting platform base. | ||
| + | #* Designed and printed switch holder. | ||
| + | # Electrical System | ||
| + | #* Run the whole system with Ultrasonic distance sensor, modify code for motor. | ||
| + | #* Melting wire to Solder PC Bread Board. | ||
| + | # Experiments | ||
| + | #* Determined the restrictions on the height of glassware (7-17cm) and minimum height of glassware (7cm). | ||
| + | #* Make sure that they system can operate under given conditions: | ||
| + | #** the bottle has more liquid than the volume of glassware. | ||
| + | #** the bottle has less liquid than the volume of glassware. | ||
| + | # Demo | ||
| + | #* Finished poster and ready for demo. | ||
| + | <gallery mode=packed heights=150px style="text-align:left"> | ||
| + | File:Switch holder.PNG | switch holder | ||
| + | File:Gh.PNG | lifting platform holder | ||
| + | File:11.jpeg | switch holder | ||
| + | File:12.jpeg | lifting platform holder | ||
| + | File:13.jpeg | Pulley stabilizer | ||
| + | </gallery> | ||
[[Category:Logs]] | [[Category:Logs]] | ||
[[Category:Spring 2017 Logs]] | [[Category:Spring 2017 Logs]] | ||
Latest revision as of 14:36, 9 May 2017
Contents
- 1 Week 1 (1/23 - 1/29)
- 2 Week 2 (1/30 - 2/5)
- 3 Week 3 (2/6-2/12)
- 4 Week 4 (2/13-2/19)
- 5 Week 5 (2/20-2/26)
- 6 Week 6 (2/27-3/5) First Evaluation
- 7 Week 7 (3/6-3/12)
- 8 Week 8 (3/13-3/19) Spring Break
- 9 Week 9 (3/20-3/26)
- 10 Week 10 (3/27-4/2)
- 11 Week 11 (4/3-4/9) Second Evaluation
- 12 Week 12 (4/10-4/16)
- 13 Week 13 (4/17-4/24)
Week 1 (1/23 - 1/29)
Formulate group and brainstorm about project ideas. We decided to replicate a beer pouring machine on youtube.
Week 2 (1/30 - 2/5)

We met with Natalie (TA) to help us straighten the project objective, determine several potential challenges and write out the project proposal. We researched about the specific mechanism to control tilt angles as it was not clearly shown in the video It was decided that we use two 90 degrees lever, each for soda bottle and glassware, tied with a fishing line connected to a spool on a step motor to control the tilt angle (Figure 1). The start for the system is controlled by a push button and the stop pouring signal should be decided by laser detection. Arduino was found to be useful in the process in controlling this process. For a potentially successful project, the budget was determined after objective and challenges were identified.
Week 3 (2/6-2/12)

We compared the pros and cons of various available sensors (distance sensor, color sensor, laser sensor, liquid level sensor and weight sensors) and decided to change our laser sensor to weight sensor. Other sensors all have high chances of electric shock as it is very hard to cover the sensor to prevent liquid damage. Weight sensor could be hidden in the base holder of the glassware and the wires are sent to the Arduino board inside the support stands. In addition, we decided to put a wooden cover on the Arduino board and stepper motor. The fishing line will be sent out from the cover through a little hole and connect to the lever using four pulleys. We together altered the objective in the project proposal to make the mechanical models and its tilting mechanism more robust.
Haixiang finished the tutorial on Introduction to Solidworks and Tutorial 1. Jessie started drawing pictures for the mechanical design of the system and editing the project proposal page. We realized that 3D printing could only print a maximum length of 8 inches so we decided to print three supportive stands on each side to make a strong base, and each stand will be made out of 2 pieces of 3D printings.
Week 4 (2/13-2/19)

- Proposal
- Changed the stepper motor to servo motor to avoid from getting hot at zero speed.
- Added the 2 double pulley system to cut the weight of the bottle (with soda) to 1/4 of its original weight as sensed by the motor.
- Added the wooden cover idea to the proposal to separate the mechanical system from the electrical system. The mechanical system will be built on top of the electrical system and the wires to connect to the weight sensor is through the base (will not be out in air).
- Researched various ways of supplying power to the servo motor, whether is it through the Arduino board portal, using two separate power supplies or connecting the Arduino board and the two motor in parallel or series, etc. We decided to use a single power supply and connecting the two motors and Arduino board all parallel to each other. The power supply would be 6V 3A wall power adaptor. The two motors can operate at the voltage of 4.8V to 6V(correspond to maximum stall torque) and the Arduino board can operate at a minimum of 6V. As we will not need the Arduino board to supply a lot of power (push button and weight sensor), we thought it should be fine.
- Mechanical System
- Started building the model the part 1 of the base and learned to use the Ultimaker 2 Extended machine with Natalie and Nathan over the weekend.
- Printed the first model of base 1.
Base 1
Base 1


Week 5 (2/20-2/26)
- Proposal
- Went to Home Depot found a U-bolt that could serve as the bottle holder so that it can tilt more than 90 degrees.
- Ordered the pulleys.
- Mechanical System:
- Adjusted the part 1 base so that the attachment part to part 2 of the base will not interfere with the swing. The nut hole in base 1 was also adjusted.
- Calculated exact parameters needed and designed part 2 of the base, the horizontal rotating axis.
- Built the 3D model for base 2 and horizontal rotation axis.
- Start printing out an initial model for base 2 and horizontal axis.
- Had a rough sketch of the model for the bottle holder and the lever arm and how it will be attached to the horizontal arm.
Base 1 edited

Base 2 (will be put on top of base 1)
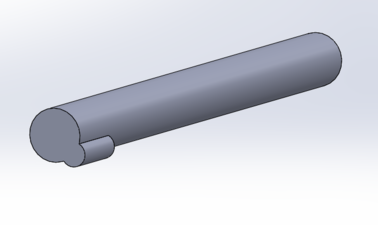
Horizontal Rotation Axis
Bottle holder
Bottle swing





Week 6 (2/27-3/5) First Evaluation

- Proposal
- Decided to put the electrical system on top of the mechanical system with a wooden stage, then the fishing line from the motor will be pulling from the bottom of the bottle.
- Decided to not let the glassware tilt but keep in on the table. This would make the weight sensor be more accurate in estimating the amount of soda in glassware. (as we will not be dealing with component forces of the weight of glassware with soda).
- Mechanical System
- Adjusted hole parameters on base 2 so that it could fit with base 1 and horizontal axis better.
- Redesigned the bottle holder and the swing so for the adjusted proposal.
- Printed out two base 2s and assembled the initial mechanism system without the bottle holder.
Bottle Swing edited

Week 7 (3/6-3/12)

- Proposal
- Ordered all parts.
- Had a new picture representing the system (right) with target dimensions of the wooden frame.
- Added the support system for the bottle so that the motor do not have to withstand a large amount of torque while the bottle is at rest (position 1).
- Mechanical System
- Deleted the 45 degree angle to hold the bottle as it has a high chance of fracture.
- Modified the bottle holder so that the fish lines would connect directly to the bottle holder base.
- Printed the bottle base edition 2 and assembled the mechanical design. (picture shown below)
- Electrical System
- Learned about Arduino board and breadboard.
- Followed a simple tutorial to control an LED with toggle switches.


Week 8 (3/13-3/19) Spring Break
- Mechanical System
- Designed the specific dimensions of the support system for the bottle.
- Went to HomeDepot and decided to use the wood from there instead of the provided one from machine shop.
- Electrical System
- Learned how to control the motor (turning at different directions and different speeds) using Arduino.
Week 9 (3/20-3/26)
- Mechanical System
- Redesigned the bottle holder and swing so that it will be more stable and accommodate for two pair of holes for the two U bolts.
- Printed out the bottle holder and swing. (picture shown below with only 1 U bolt used)
- Decided to use two U bolts to keep the bottle in place better.
- Resigned the motor holder and printed it out.
- Designed the lower half of the IR distance sensor suspension system and printed out.
- Electrical System
- Learned how to control the IR sensor using Arduino by following the link here.
- Started Algorithm design of drawing a flowchart.

Lower half of distance sensor suspension system
Motor holder
Bottle holder base

Bottle holder swing




Week 10 (3/27-4/2)

- Mechanical System
- Bought wood from HomeDepot to make the wooden frame.
- Drilled holes and cut a piece off from the one of the wood to make room for pulley (took us total of 7 hours).
- Designed the spool to affix on the accessory on the servo motor.
- Designed the upper half of the IR distance sensor suspension system after have exact dimensions of the wooden frame.
- Electrical System
- We calibrated the infrared distance sensor and generated a curve (shown on the right). We got a best fit line that translates to distance = 12293*(AnalogRead)^-1.148.
- Adjusted the algorithm flow chart.
- Write code to use the IR distance sensor as sensor and control the rotating speed of the servo motor.

Upper half of distance sensor suspension system

Week 11 (4/3-4/9) Second Evaluation
- Proposal
- After the second evaluation, we decided to try out the ultrasonic sensor and it was giving more stable outputs when dealing with liquid so we decided to switch the IR distance sensor to ultrasonic distance sensor.
- Mechanical System
- Printed the spool and attached it to the servo motor.
- Designed and printed pulley stabilizer.
- Assembled the printed parts onto the wooden frame.
- Electrical System
- Assembled the motor and IR distance sensor onto the wooden frame.
- Learned how to use the ultrasonic sensor and experimented with it.
- Experiments
- Conducted experiment to test if the IR distance sensor is correctly measuring its distance to the liquid level distance.
- Conducted experiments to use the motor to tilt an empty coca cola bottle to an angle more than 90 degrees to the horizontal at varying speed and going back to its original position.
- Put the toggle switch, ultrasonic sensor and motor in one system.
spool

Week 12 (4/10-4/16)
- Proposal
- Ordered a lifting platform in order to accommodate various glassware heights.
- Mechanical System
- Designed Ultrasonic distance sensor holder.
- Redesigned and printed a pulley holder as the previous stabilizer was not good enough that the fishing line keeps falling off the pulleys.
- Redesigned Ultrasonic distance sensor suspension system.
- Electrical System
- Measured the specific fast and low speed setting on the motor.
- Write code for the entire system, found here.
- Experiments
- Run the whole system, change some number setting in Arduino (speed of motor and delay times in distance sensor) and find set of values that work for out system.
- Demo
- Start design poster.
Pulley stabilizer
Ultrasonic distance sensor holder


Week 13 (4/17-4/24)
- Mechanical System
- Printed Ultrasonic distance sensor holder.
- Printed the glassware base to accommodate for the lifting platform.
- Printed Ultrasonic distance sensor suspension system.
- Designed and printed lifting platform base.
- Designed and printed switch holder.
- Electrical System
- Run the whole system with Ultrasonic distance sensor, modify code for motor.
- Melting wire to Solder PC Bread Board.
- Experiments
- Determined the restrictions on the height of glassware (7-17cm) and minimum height of glassware (7cm).
- Make sure that they system can operate under given conditions:
- the bottle has more liquid than the volume of glassware.
- the bottle has less liquid than the volume of glassware.
- Demo
- Finished poster and ready for demo.
switch holder
lifting platform holder

switch holder

lifting platform holder

Pulley stabilizer




